David Ras
Forista
- Modelo
- X1 sDrive 20i
- Registrado
- 14 Jun 2024
- Mensajes
- 1.273
- Reacciones
- 1.738
Guía de sensores, radares y cámaras BMW (Parte 3).
En este post explicaremos lo que hace cada componente, como funciona y como se relaciona con el resto de componentes.
FRS Sensor de radar frontal
En la parte central de la calandra delantera, se ve una especie de rectángulo, y detrás hay un hueco que puede estar vacío (en el acabado básico o de serie), o equipado con el Sensor de radar frontal FRS, o con el Sensor de radar frontal de largo alcance FRSF.
En el acabado básico o de serie el hueco está vacío.
El coche lleva el radar frontal FRS si equipa una de las siguientes opciones:
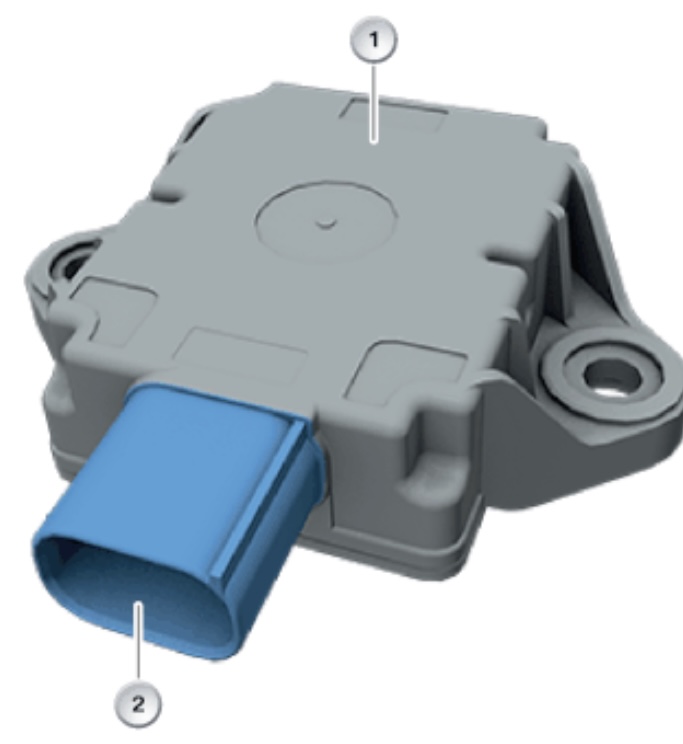
El radar frontal FRS incluye dos componentes dentro del mismo módulo. Por una parte es un sensor o radar que emite ondas de radio para calcular distancias entre el coche y los objetos cercanos y que funciona a 77 GHz de frecuencia, y por la otra es una unidad de control que procesa parte de los datos.
Se utiliza en sistemas de asistencia al conductor como:
Algunas de las funciones también requieren la Cámara de Conducción Autónoma Básica (ADCAML, coche de serie) y los radares frontales de corta distancia (SRSNVR y SRSNVL, coche con DA Pro).
El radar frontal FRS realiza las siguientes mediciones para detectar objetos:
*Foto del radar frontal FRS (1) y del conector de 12 pines (2).
FRSF Sensor de radar frontal de largo alcance
En el mismo hueco donde se instala el FRS, también puede instalarse el Sensor de radar frontal de largo alcance FRSF, pero no los dos a la vez.
El coche lleva el radar frontal de largo alcance FRSF solo si equipa la opción 5AU Drive Assistant Professional.
El radar frontal de largo alcance FRSF también incluye dos componentes dentro del mismo módulo. Por una parte es un sensor o radar que emite ondas de radio para calcular distancias entre el coche y los objetos cercanos y que funciona a 77 GHz de frecuencia, y por la otra es una unidad de control que procesa parte de los datos.
Se utiliza en sistemas de asistencia al conductor como:
Algunas de las funciones también requieren la Cámara de Conducción Autónoma media (ADCAMM), los radaras frontales de corta distancia (SRSNVR y SRSNVL), la unidad de control del sensor ultrasónico (USS), la Plataforma de conducción automática media (MPAD) y la unidad de control RSNECU.
El radar frontal de largo alcance FRSF realiza mediciones para detectar objetos y vehículos, es capaz de detectar los vehículos aparcados y vehículos por delante a una distancia de hasta 250 / 300 m de distancia, en todo tipo de condiciones climáticas y puede realizar un frenado de emergencia.
Todos los datos del FRSF y los de la cámara de conducción autónoma ADCAMM son evaluados por la plataforma de conducción automática media (MPAD), para determinar la información del carril de conducción, las posiciones y los movimientos del vehículo.
*Foto del radar frontal de largo alcance FRSF (1), y de los conectores de 6 pins (2) y de 2 pins (3).
SRSNVL y SRSNVR Sensores de radar lateral de corta distancia delantero izquierdo y derecho
También en la parte delantera del coche pero debajo de los faros y en la parte más exterior, hay opcionalmente dos radares idénticos, uno a cada lado, el Radar frontal lateral izquierdo de corto alcance SRSNVL y el Radar frontal lateral derecho de corto alcance SRSNVR. Además, cuando lleva estos dos radares necesita una Unidad de control, la RSNECU.
Para tener estos dos radares SRSNVL y el SRSNVR y la unidad de control RSNECU, el coche debe equipar la opción 5AU Drive Assistant Professional.
Estos dos radares de corto alcance funcionan con una frecuencia de 77 GHz y se pueden configurar para funcionar de dos maneras:
Con un ancho de banda de 425 MHz, y un rango de visión de 42 metros aprox.
O con un ancho de banda de 175 MHz, y un rango de visión de 90 metros aprox.
Y se utilizan en sistemas de asistencia al conductor como:
Asistente de dirección y control de carril, incluido el asistente de carril
Detección de tráfico cruzado con protección activa contra colisiones laterales
Asistente de parada de emergencia
Asistente de cambio de carril
Advertencia de colisión frontal con el Asistente de evasión
Advertencia de colisión frontal con intervención de freno (advertencia de colisión, giro, cruce y peatones)
Control de distancia (control de crucero activa con parada y arranque)
Asistencia de límite de velocidad
Advertencia de conducción incorrecta (contra dirección)
Advertencia de salida y tráfico frontal
Advertencia de tráfico frontal cruzado con intervención de freno
Algunas de las funciones también requieren la Cámara de Conducción Autónoma media (ADCAMM), los radaras frontales de corta distancia (SRSNVR y SRSNVL), la unidad de control del sensor ultrasónico (USS), la plataforma de conducción automática media (MPAD), el radar frontal de largo alcance (FRSF) y la unidad de control RSNECU.
Los radares laterales de corta distancia delanteros SRSNVR y SRSNVL siempre se utilizan junto con los radares laterales de corta distancia traseros HRSNL y HRSNR. En este caso, el HRSNR actua como unidad de control maestra.
*Foto de los radares laterales de corta distancia delantero izquierdo (SRSNVL) y derecho (SRSNVR) (1), y del conector de 12 pines (2).
RSNECU Unidad de control del sensor de radar de alcance cercano
La unidad de control del radar de alcance cercano (RSNECU) se instala con el equipo opcional SA5AU Drive Assistant Professional y se utiliza en sistemas de asistencia al conductor como:
Asistente de dirección y control de carril, incluido el asistente de carril
Asistente de parada de emergencia sin cambio de carril
Asistente de cambio de carril
Asistente automático de límite de velocidad, con aviso en pantalla del límite de velocidad, e indicador de adelantamiento no adecuado y preaviso
Control de crucero activo con función de arranque y parada
Advertencia de señal de tráfico de cruce
Advertencia de sentido equivocado para autopistas (contradirección)
Asistente de evitación
Advertencia de tráfico cruzado delantero y trasero con función de frenado
Estas funciones necesitan la Cámara de conducción autónoma media (ADCAMM), la unidad de control del sensor ultrasónico (USS), la plataforma de conducción automática media (MPAD), el radar lateral de corta distancia delantera izquierda (SRSNVL) y derecho (SRSNVR), así como el radar frontal de largo alcance (FRSF).
La unidad de control de alcance cercano (RSNECU) es la unidad de control maestra para los siguientes sensores de radar:
Radar lateral de corta distancia delantero izquierdo (SRSNVL) y radar lateral de corta distancia delantero derecho (SRSNVR)
Radar trasero de corta distancia izquierdo (HRSNL) y radar trasero de corta distancia derecho (HRSNR)
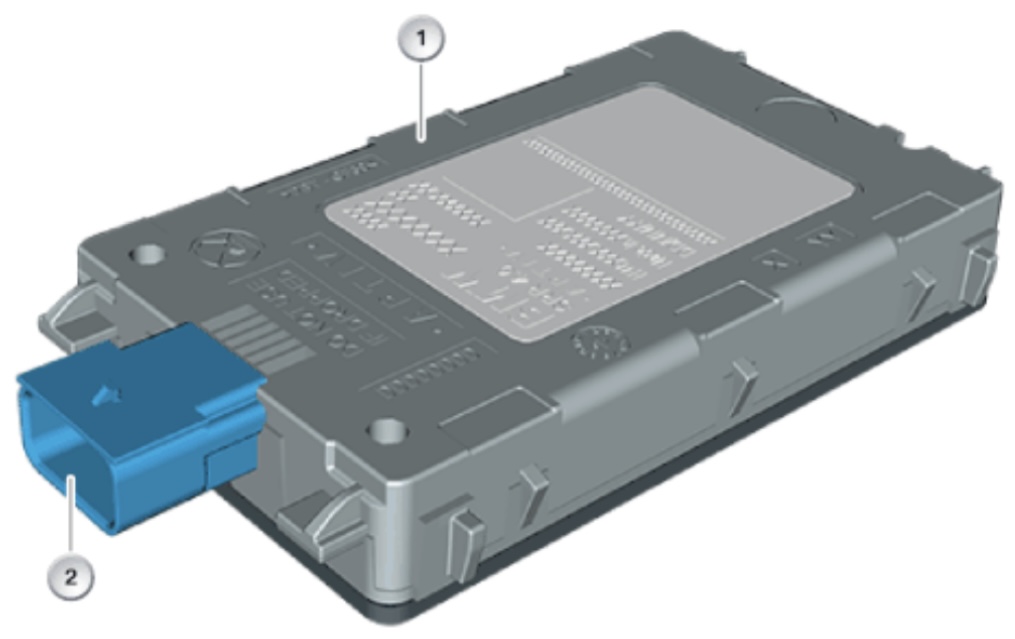
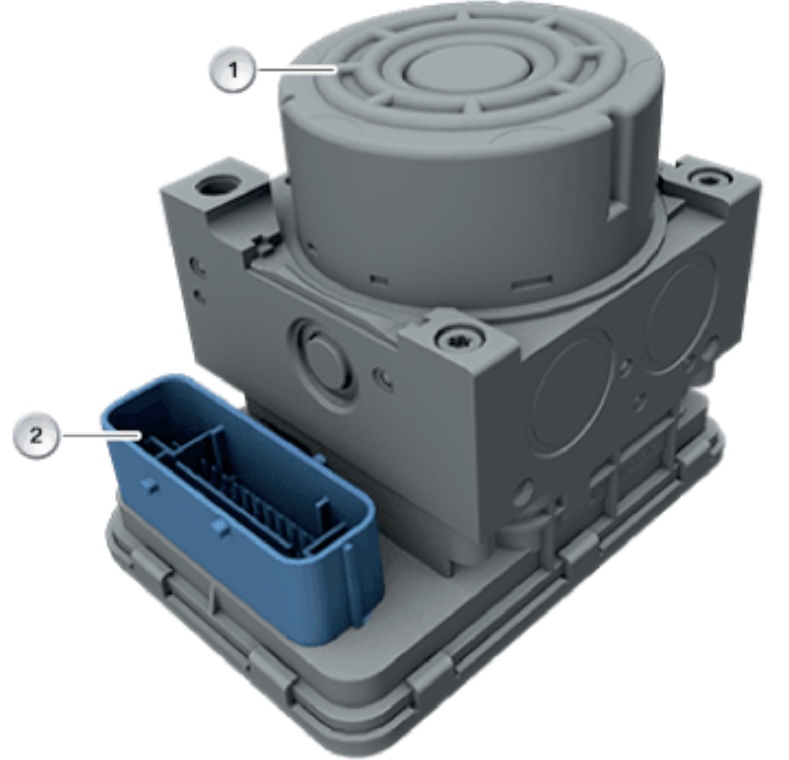
*Foto de la unidad de control del radar de alcance cercano RSNECU (1), y del conector de 20 pins (2).

ADCAML Cámara de conducción autónoma de corto alcance
En el parabrisas delantero, a la altura del retrovisor central y debajo del cristal, el coche tiene espacio para un módulo de sensores y cámaras. Para saber que módulo lleva, la clave está en la opción 5AU Drive Assistant Professional.
Si el coche no lleva DA Pro, utiliza el módulo ADCAML (cámara de conducción autónoma de corto alcance).
Si el coche si lleva el DA Pro, entonces utiliza el módulo ADCAMM (cámara de conducción autónoma de medio alcance).
El módulo ADCAML integra una unidad de control básica y una cámara de conducción autónoma de corto alcance “básica” (Autonomous Driving Camera Low) en el hueco que hay encima del retrovisor central. El módulo tiene espacio para una segunda cámara para realidad aumentada “básica” (Camera augmented reality low).
El módulo ADCAML se utiliza para visualizar en sistemas de asistencia al conductor como:
Control de crucero activo con función de arranque y parada (Stop&Go)
Advertencia de salida de carril
Asistente de luz de carretera
Limitación de velocidad máxima
Advertencia de colisión
Advertencia de tráfico al girar a la izquierda
Prohibición de adelantamiento
Prevención de accidentes de tráfico urbano
Protección preventiva para peatones
Asistente de atascos de tráfico
Para ello, se utilizan las siguientes características de identificación:
Detección de objetos: Los vehículos, motocicletas, bicicletas y peatones se reconocen analizando las imágenes de la cámara frontal.
Detección de marcas de carril: La cámara frontal permite reconocer las marcas de carril de las imágenes de la cámara y relacionar su forma y posición.
Detección de luz: La cámara frontal detecta la luz de otros usuarios de la carretera (vehículos, bicicletas, peatones) para apagar y encender las luces delanteras del coche
*Foto de la cámara de conducción autónoma de corto alcance ADCAML (1) y de los conectores de 4 pins (2) y 12 pins (3).
La calibración de la unidad de control ADCAML se realiza mientras se conduce, y necesita al menos 5 kilómetros para calibrarse. También se puede recalibrar en el taller.
ADCAMM Cámara de conducción autónoma de medio alcance
Como hemos dicho antes, si el coche lleva el Drive Assistant Pro, entonces utiliza el módulo ADCAMM (cámara de conducción autónoma de medio alcance), en el mismo hueco donde va el ADCAML (de corto alcance), al cual sustituye.
El módulo ADCAMM incluye el propio módulo, más potente y por tanto instalado en el pilar A del lado del pasajero delantero (copiloto), y una cámara de conducción autónoma de medio alcance (Autonomous Driving Camera Mid) con un ángulo de visión de 120 grados que se aloja en el hueco encima del retrovisor y debajo del parabrisas. El hueco tiene espacio para una segunda cámara para realidad aumentada media y superior (Camera augmented reality mid/high).
La unidad de control de la cámara de conducción autónoma media (ADCAMM) forma parte de un gran sistema descentralizado de asistencia al conductor que gestiona y controla todas las funciones visuales de la cámara de conducción autónoma delantera ADCAMM, las de protección activa contra colisiones laterales, las que advierten al conductor en caso de riesgo de colisión desde el frente, y funciona como enlace entre el procesador de imágenes y la comunicación a través de Ethernet.
Las siguientes características de identificación se tienen en cuenta en una unidad de control del ADCAMM para la conducción automatizada:
Marcas viales
Objetos (vehículos, peatones, animales)
Espacio libre delante del vehículo
Señales de tráfico
Estado de la superficie de la carretera
Vista previa del curso de la carretera
Vista previa del curso de las marcas de carril
Velocidad de conducción propia
Puntos de referencia visuales
*Foto de la cámara de conducción autónoma media ADCAMM (1) y de las conexiones de 2 pins (2) y 20 pins (3).
La calibración de la unidad de control ADCAMM se realiza mientras se conduce, y necesita menos de 5 kilómetros para calibrarse.
HRSNL Sensor de radar trasero de corta distancia izquierdo y HRSNR derecho
En la parte trasera del coche, debajo de los faros traseros y en la parte más exterior, hay opcionalmente dos radares idénticos, uno a cada lado, el Radar trasero izquierdo de medio alcance HRSNL y el Radar trasero derecho de medio alcance HRSNR.
Estos radares HRSNL y HRSNR son idénticos a los SRSNVL y el SRSNVR delanteros, y todos funcionan con una frecuencia de 77 GHz y se pueden configurar para funcionar de dos maneras:
Con un ancho de banda de 425 MHz, y un rango de visión de 42 metros aprox.
O con un ancho de banda de 175 MHz, y un rango de visión de 90 metros aprox.
Los 4 necesitan la Unidad de control RSNECU para que los gestione y controle.
Para tener estos dos radares HRSNL y HRSNR y la unidad de control RSNECU, el coche debe equipar la opción 5AS Drive Assistant “básico” o la 5AU Drive Assistant Professional.
Los radares HRSNL y HRSNR se utilizan en sistemas de asistencia al conductor como:
Asistente de dirección y guía de carril
Asistente de cambio de carril
Advertencia de cambio de carril con retorno activo
Advertencia de tráfico cruzado trasero con función de frenado
Advertencia de colisión trasera
Advertencia de salida en la parte trasera
Asistente de parada de emergencia
Los sensores de radar traseros de corta distancia también se pueden utilizar como una solución independiente de los delanteros si no estan instalados.
Si se instala la unidad de control del radar de alcance cercano (RSNECU), esta será la unidad de control principal para los radares de alcance cercano delanteros y traseros, y los HRSNR y HRSNL seran unidades de control esclavas.
Si no se instala la unidad de control del radar de alcance cercano (RSNECU), el HRSNR actúa como unidad de control maestra y la HRSNL como esclava.
*Foto de los radares laterales de corta distancia trasero izquierdo (HRSNL) y derecho (HRSNR) (1), y del conector de 12 pines (2).
RVC Cámara de visión trasera
La cámara de visión trasera RVC, que se utiliza para la marcha atrás, está incluida en la opción 5DM Parking Assistant “básico” y está incluida en un único módulo que agrupa una única cámara y la unidad de control que la gestiona.
Se conecta al BCP por ethernet y está codificada para evitar una confusión con las otras cámaras.
La cámara de visión trasera (RVC) ayuda en el aparcamiento marcha atrás y en las maniobras, mostrando las imágenes en la pantalla central del coche. En ella se muestran también las líneas de orientación para calcular las distancias, el radio de giro, los obstáculos, hay una función de zoom cuando hay un remolque enganchado y se miden los ángulos de giro para el asistente de remolque.
La cámara puede alcanzar hasta 100 metros de distancia, con un ángulo horizontal de 180° (grados) y uno vertical 100 ° (grados).
Se activa cuando se pone la marcha atrás o se presiona la tecla de ayuda al aparcamiento, y se apaga cuando el coche alcanza 20 metros hacia adelante o supera los 20 km/h.
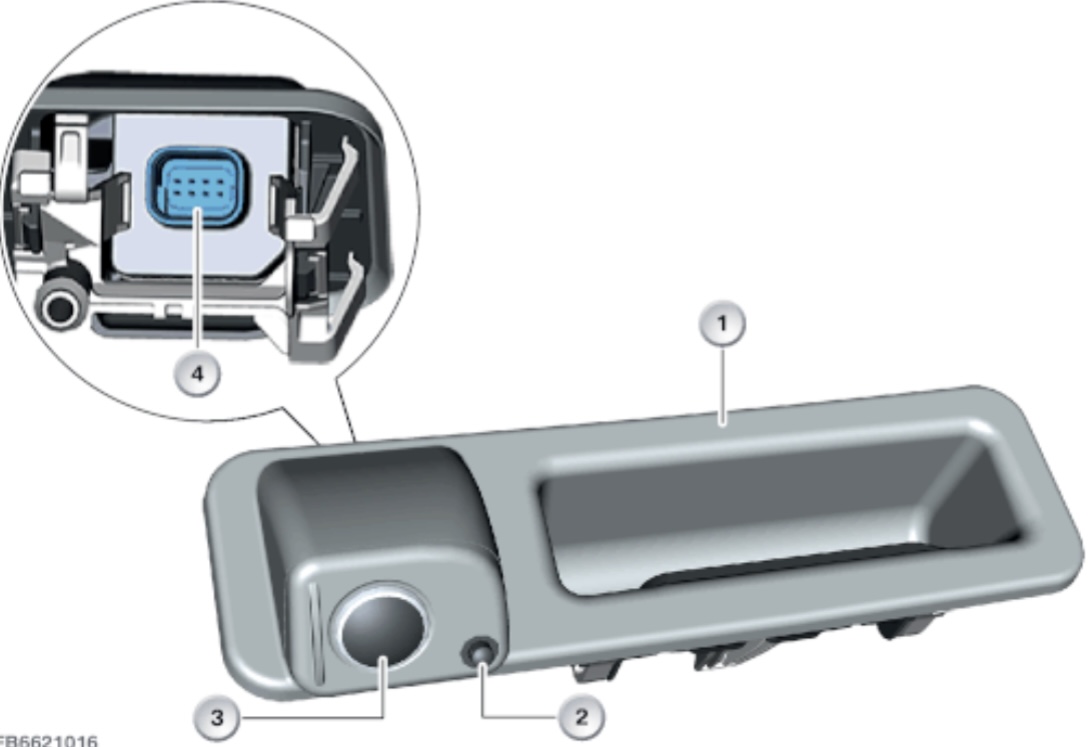
*Foto de la empuñadura para abrir y cerrar el portón trasero (1), de la cámara de visión trasera RVC (3), del inyector a chorro para lavar la cámara (2) y del conector de 8 pins (4).
En algunas ocasiones el sistema puede avisar que la cámara está sucia, y si la lente está sucia puede que la imágen no se vea bien y que la unidad de control no pueda evaluar correctamente las distancias y las imágenes, e incluso provocar un fallo en el sistema. Para evitarlo, lo mejor es mantener limpia la lente de la cámara.
Sensores ultrasónicos
El asistente de aparcamiento ayuda a aparcar en espacios de aparcamiento paralelo a la vía (en línea) y perpendiculares a la carretera (en batería), así como ayuda a salir de una Plaza de aparcamiento sin peligro.
Para esto, el Parking Assistant mide los posibles espacios de aparcamiento cuando se conduce a una velocidad inferior a 36 km/h sin necesidad de activación previa. El espacio de aparcamiento se muestra en la pantalla central y el asistente se hace cargo de todo el control del vehículo, incluyendo dirección, pedal del acelerador, freno y selección de marchas. El conductor solo es responsable de monitorizar la maniobra de estacionamiento y actuar en caso de energencia.
Con la opción 5DM Parking Assistant “básico” los 12 sensores o radares ultrasónicos (6 en la parte delantera y 6 en la trasera) están conectados y gestionados por la unidad de control del sensor ultrasónico (USS).
Con la opción 5DN Parking Assistant Plus o 5DW Parking Assistant Pro los 12 sensores ultrasónicos (6 en la parte delantera y 6 en la trasera) están conectados a la Unidad de control de estacionamiento automatizado con cámara ultrasónica (UCAP).
Las mediciones de estos sensores o radares se utilizan en:
La vista asistida, la visualización de distancias y la guía de conducción, incluyendo un esquema en la pantalla del conductor y la vista superior del vehículo.
La visualización mejorada de los espacios de aparcamiento gracias a la representación de medidas a escala en pantalla.
Los avisos acústicos (por ejemplo, un pitido sonoro cuando se encuentra un espacio de aparcamiento) y la superposición de las imágenes de la cámara y las guías, que se pueden configurar.
El Parking Assistant utiliza sensores o radares ultrasónicos para realizar la medición de distancias entre el vehículo y los objetos que lo rodean, dentro del alcance de los sensores.
Estos sensores ultrasónicos emiten pulsos ultrasónicos que son reflejados por los obstáculos y que regresan al sensor (impulsos de eco) que los recibe, los amplifica y transforma en una señal digital que envia a la unidad de control USS o la UCAP.
La unidad de control USS o la UCAP enciende los sensores ultrasónicos cuando el Control de Distancia del Aparcamiento (PDC) está activo, que pueden estar en modo combinado de transmisión y recepción, o en modo de solo recepción.
En el modo de solo recepción, un sensor ultrasónico puede captar los impulsos de eco enviados por los sensores vecinos, De esta forma la unidad de control USS o la UCA, pueden evaluar las señales de hasta 3 sensores ultrasónicos ("triangulación" de una zona o sección contigua) para calcular la distancia mínima entre el vehículo y el objeto sin chocar.
*Foto de los sensores o radares ultrasónicos (1), el diafragma (2) y el conector de 3 pins (3). El hecho de que el conector (3) esté por un lado (A, radial) o por el otro (B, axial) depende de la posición que el sensor ocupa en el parachoques.
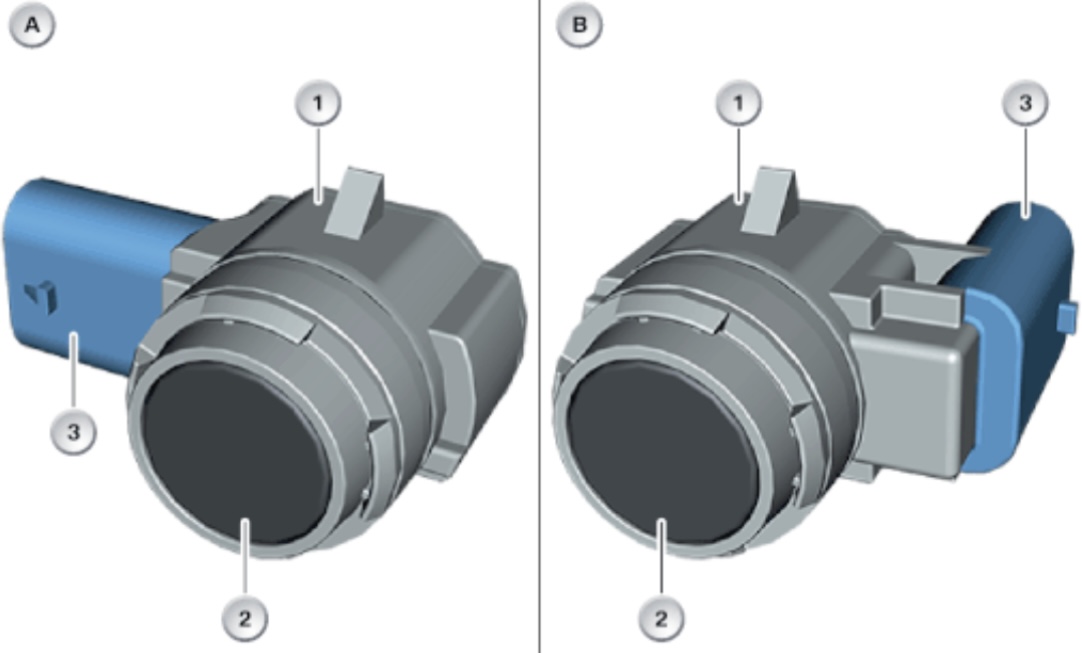
Los sensores o radares ultrasónicos de los parachoques delantero y trasero son todos idénticos, y tienen un diafragma más pequeño que los sensores normales. El diafragma siempre está pintado del color de la carroceria, por lo que hay un código para cada color aunque sean idénticos.
El sensor ultrasónico incluye una memoria en su electrónica que se puede programar y codificar para ajustar la sensibilidad de la recepción del eco. También incluye una Unidad transceptora piezocerámica detrás del diafragma y un componente electrónico de evaluación.
USS Unidad de control del sensor ultrasónico
Tal y como hemos comentado en el punto anterior, si el coche está equipado con la opción 5DM Parking Assistant “básico”, esta incluye la Unidad de control del sensor ultrasónico (USS), pero si el coche está equipado con la opción 5DN Parking Assistant Plus o 5DW Parking Assistant Pro, entonces incluye la Unidad de control de estacionamiento automatizado con cámara ultrasónica (UCAP), que tiene mayor capacidad de procesamiento.
La Unidad de control de sensor ultrasónico USS controla y gestiona los 12 sensores de los parachoques, está incluida en la opción 5DM Parking Assistant “básico” y sirve de ayuda a la hora de aparcar.
Si el coche no lleva la opción 5DM Parking Assistant “básico” pero si lleva la opción 3AG Reverse Assist Camera RVC, la USS es capaz de entenderse y coordinarse con la cámara de visión trasera RVC.
Gracias a la USS es posible maniobrar en espacios de aparcamiento longitudinales (en línea) y transversales (en batería).
Según el modelo de vehículo, la unidad de control USS se aloja debajo del cuadro de mandos o en el maletero.
La unidad de control USS permite:
La detección automática de un espacio de aparcamiento suficientemente grande
El aparcamiento automático
La prevención efectiva de daños en el aparcamiento
El asistente de remolque
El asistente de marcha atrás
Todo el sistema se puede configurar con:
8 canales (4 sensores ultrasónicos delanteros, y 4 traseros),
12 canales (6 sensores ultrasónicos delanteros, y 6 traseros, 2 de los cuales en el lateral).
Por debajo de los 35 km/h y con un espacio lateral libre máximo de 1,5 m entre nuestro coche y la fila de los coches aparcados en línea, los sensores o radares ultrasónicos muestran al conductor cada posible espacio de aparcamiento en la pantalla central.
El asistente de aparcamiento automático proporciona asistencia activa para el aparcamiento cuando el intermitente de ese lado está puesto y se pulsa el botón de asistencia de estacionamiento, seleccionando la marcha adelante y la marcha atrás, y girando el volante a izquierda y derecha cuando sea necesario.
Cada error o paro de emergencia de la maniobra se guarda en la memoria de fallos de la unidad de control del USS y el sistema comprueba si la maniobra se puede reanudar. Si es necesario, el conductor puede reanudar la maniobra manualmente inmediatamente.
El sonido de audio se puede apagar o reducir temporalmente solo en la maniobra actual o configurar para que lo haga siempre en todas las maniobras de aparcamiento automático.
El control automático de distancia de aparcamiento (PDC) facilita el aparcamiento y la salida de espacios de aparcamiento estrechos, y se activa automáticamente cuando el coche se acerca lentamente a un obstáculo, o para evitar colisiones y/o reducir la gravedad del accidente.
El sonido de alerta suena en función de la distancia, el ángulo de dirección, y el riesgo existente de colisión. Y en la pantalla central se visualizan las distancias y la trayectoria del vehículo en una vista superior esquemática del vehículo.
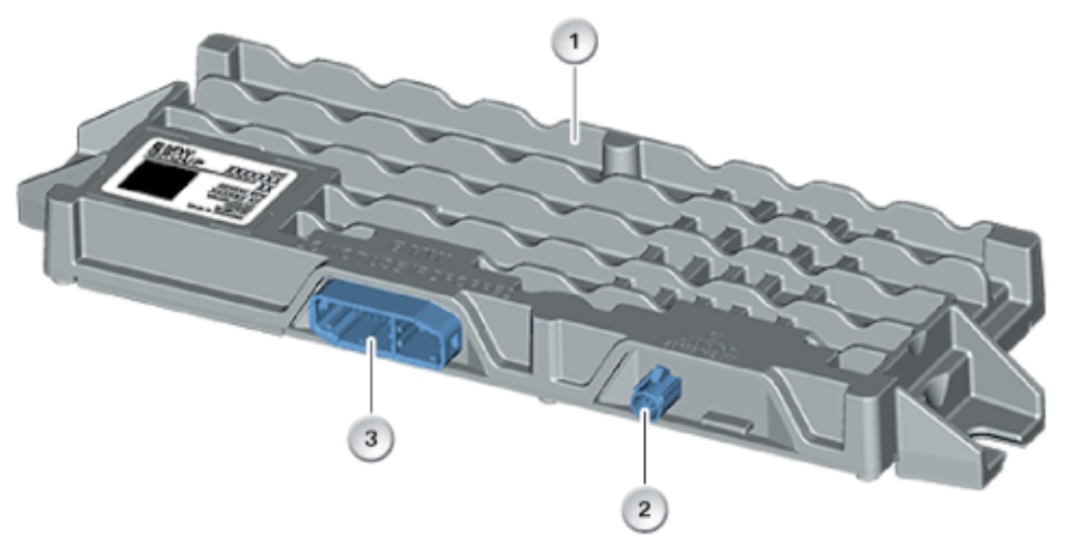
*Foto de la Unidad de control del sensor ultrasónico USS (1) y el conector de 26 pubs (2).

La unidad de control USS puede registrar los fallos y errores, pero no puede determinar si los sensores ultrasónicos están instalados, conectados incorrectamente, o si la zona del parachoques próxima al sensor está dañada. Esto puede provocar que no se detecten plazas de aparcamiento pequeñas, que el vehículo pase muy cerca o muy lejos del vehículo delantero, que quede aparcado muy lejos o muy cerca de la acera, o que quede aparcado en diagonal en vez de paralelo a la acera.
De la USS solo hay una versión, que se instala desde el 01/11/2023, pero de la UCAP hay 6 versiones diferentes, aunque son solo 5 generaciones.
UCAP Unidad de control de estacionamiento automatizado con cámara ultrasónica
La Unidad de Estacionamiento automatizado con cámara ultrasónica UCAP controla y gestiona los 12 sensores de los parachoques, y las 4 cámaras de ayuda para aparcar (delante, detrás y en los dos retrovisores exteriores). Está incluida en las opciones 5DN Parking Assistant Plus y 5DW Parking Assistant Professional. La UCAP también sirve de ayuda a la hora de aparcar pero tiene mayor capacidad de procesamiento que la USS.
Los coches que tengan la opción 6DR BMW Drive Recorder también necesitan la UCAP para poder funcionar.
Las 4 cámaras que están conectadas a la unidad de control UCAP a través de SerDes son:
La cámara de aparcamiento autónomo frontal, en la calandra y el parachoques delantero
La cámara de aparcamiento autónomo trasero, en el portón trasero
La cámara de aparcamiento autónomo izquierdo, en el retrovisor exterior izquierdo
La cámara de aparcamiento autónomo derecho, en el retrovisor exterior derecho
La unidad de control UCAP es un sistema de asistencia de aparcamiento con visión envolvente que proporciona funciones extendidas para el aparcamiento automatizado, entre ellas:
Aparcamiento automatizado
Control de distancia de aparcamiento
Asistente de remolque
Visualización de la maniobra de aparcamiento
Grabación de la maniobra de aparcamiento
Transmisión de los datos de las cámaras
La unidad de control UCAP monitoriza el estado de las cámaras y, en el caso de detectar suciedad activa la limpieza de las cámaras delantera y trasera.
*Foto de la Unidad de control de aparcamiento automatizado con cámara ultrasónica UCAP (1), y los conectores de 4 pins (2), 2 pins (3) y 32 pins (4).

Si se sustituye la unidad de control UCAP o una de las cámara a ella conectada, es necesario conducir de 1 a varios kilómetros, a una velocidad de entre 1 y 50 km/h y un ángulo de entre -1° y +1°, es decir en línea lo más recta posible, para recalibrar las cámaras y la unidad de control.
De la USS solo hay una versión desde el 01/11/2023 en adelante, pero de la UCAP hay 6 versiones diferentes, aunque puede que sean solo 5 generaciones o menos.
La que podríamos llamar primera versión, generación o UCAP 1 (B3F) se instaló desde el 01/11/2023.
Las que podríamos llamar segunda generación o UCAP 2a (B4C) y UCAP 2b (B52) se instalaron desde el 01/03/2024. Seguramente son el mismo modelo pero fabricado por dos proveedores distintos.
La que podríamos llamar tercera generación o UCAP 3 (B56) se instaló desde 01/07/2024.
La que podríamos llamar cuarta generación o UCAP 4 (B60) se instaló desde 01/11/2024 y todavía está vigente.
Y finalmente la quinta generación o UCAP 5 (B65) se instaló desde 01/03/2025 y también está vigente.
El problema puede venir porque algunas de estas versiones se solapan en el tiempo, y es difícil saber que modelo exacto lleva cada coche.
Analizando las diferentes versiones se deduce que la UCAP 1 no es compatible con la opción Parking Assitant Pro, y que las UCAP 2 y posteriores (2, 3, 4, 5), que se instalaron a partir del 01/03/2024 si son compatibles con PA Pro.
Es por este motivo que los coches fabricados antes del 01/03/2024 no son compatibles con el 5DW Parking Assistant Pro, aunque lleven UCAP.
En este documento lo hemos simplificado un poco para que se entienda mejor, y decimos “la que podríamos llamar…” porque es una nomenclatura nuestra para distinguirlas más facilmente, y no sabemos cual es la nomenclatura exacta que utiliza BMW. Y seguramente no son 5 generaciones diferentes reales sino actualizaciones.
LiDAR Light Detection and Ranging
La importancia del LiDAR estriba en que los coches que incluyen conducción autónoma lo necesitan para poder funcionar, dado que tiene una gran capacidad de procesar muchos datos y a le vez de hacerlo muy rápido.
El LiDAR es parecido al radar, pero en vez de emitir ondas de radio emite haces de luz para calcular distancias entre el coche y los objetos cercanos.
Actualmente, la mayoría de coches BMW no llevan LiDAR, pero los coches que tienen la opción 5DX BMW Personal Pilot L3 incluyen el LiDAR porque lo necesitan para la conducción autónoma de nivel 3.
Hay que tener en cuenta que la opción 5DX BMW Personal Pilot L3 tiene un precio de unos 5.100 Euros aprox en el Serie 7.
LiDAR significa Light Detection and Ranging o también Laser Imaging Detection and Ranging, que se puede traducir por detección y rango de luz, y es un escáner láser que determina el tiempo que pasa entre la emisión de un rayo láser, el rebote en un objeto y la vuelta hasta el punto de origen.
Con miles de mediciones se puede crear un mapa tridimensional (3D) o nube de puntos del entorno para determinar los posibles obstáculos, medir las distancias y velocidades de un objeto, medir la velocidad de un objetivo, determinar la ruta que debe seguir el vehículo y controlar la conducción autónoma automatizada. También se pueden recalibrar los sensores y cámaras, detectar si estan sucios y limpiarlos de forma automática.
Como hemos comentado, el LiDAR solo esta disponible dentro de la opción 5DX, y esta compuesto por:
Una unidad de control central frontal (LiDARVM o LiDARFC), que se encarga de procesar la información y generar la nube de puntos.
Y 3 sensores iguales: el sensor frontal (LiDAR), el sensor de radar lateral izquierdo de alcance cercano (SRSNML) y el sensor de radar lateral derecho de alcance cercano (SRSNMR).
La conducción autónoma altamente automatizada requiere todo un sistema de sensores, unidades de control y una arquitectura redundada especial, incluyendo el sistema eléctrico, para evitar posibles errores, fallos y colusiones. Entre ellos, los módulos siguientes:
La unidad de control del LiDAR (LiDARVM o LiDARFC), con un sensor separado en la parte central delantera (LiDAR) y dos en los laterales (SRSNML ySRSNMR).
La plataforma de conducción automática alta (HPAD, HPAD2) como unidad de control central para realizar todos los cálculos necesarios para la conducción autónoma.
La plataforma de conducción automática media (MPAD) que hace de backup o sustituto del HPAD en caso de fallo durante la conducción autónoma "BMW Personal Pilot L3".
La cámara de conducción autónoma media (ADCAMM) con una cámara frontal.
El sensor de radar frontal de largo alcance (FRSF).
La unidad de control de sensores o radares de alcance cercano (RSNECU) con los sensores o radares conectados a ella.
La unidad de control de estacionamiento automatizado con cámara ultrasónica (UCAP) con las cámaras conectadas a ella.
El mapa de navegación de alta resolución descargado de la nube por la caja de comunicación telemática (TCB), y que se superpone al mapa de mediciones realizado PIR el LiDARVM.
El sensor central con los sensores de aceleración redundantes de la unidad de control del módulo de seguridad contra choques (ACSM).
El suministro de energía eléctrica seguro redundado por dos conexiones diferentes.
La batería adicional (BATTHAF) para la conducción automatizada.
El módulo de freno de reserva o backup (HAD) que actua en caso de fallo del freno principal.
La unidad de control de la dirección asistida electrónica (EPS) de reserva o backup que actua en caso de fallo de la dirección principal.
*Foto de la unidad de control central LiDARFC o LiDARVM (1), y conectores de 2 pins SerDes (2), eléctrico de 8 pins (3) y ethernet de 2 pins (4).
El sensor LiDAR emite haces de luz láser y recibe la luz reflejada en los objetos. Los resultados son las llamadas nubes de puntos, que se transmiten a la unidad de control LiDARFC o LiDARVM.
La superfície donde se recibe la luz es de cristal y tiene un elemento calefactor controlado por el LiDAR que mantiene el cristal libre de hielo. Es el LiDAR el que detecta el posible hielo y determina la potencia necesaria, pero es la unidad de control LiDARVM o LiDARFC quien emite la orden de encendido y apagado.
Las boquillas de limpieza están instaladas a los lados del sensor LiDAR y del cristal de protección y es la unidad de control MPAD la que las enciende y apaga a través de la unidad de control BCP.
*Foto del sensor LiDAR (1), del conector de 6 pins (2) al sistema eléctrico, del conector de 2 pins SerDes (3), del cristal de recepción de los haces de luz y de protección (5) y de las boquillas de limpieza (4 y 6).
HPAD y HPAD2 Plataformas de conducción automática alta
Hay dos plataformas de conducción automática alta trabajando simultáneamente: la HPAD y la HPAD2. Estas hacen los cálculos por separado y los ponen en común. Si coinciden, perfecto. Si no coinciden, se desconectan y toma el mando la MPAD, que está de respaldo o backup.
Se recuerda que las unidades de control HPAD y HPAD2 solo se instalan si el coche tiene la opción 5DX BMW Personal Pilot L3.
*Foto de las plataformas de conducción automática alta HPAD y HPAD2 (1) y del conector de 54 pins (2).
MPAD y MPAD2 Plataformas de conducción automática media
Como hemos comentado, las unidades de control MPAD y MPAD2 solo se instalan junto a los HPAD y HPAD2 si el coche tiene la opción 5DX BMW Personal Pilot L3, y se instalan como reserva para el caso que la HPAD falle.
*Foto de las plataformas de conducción automática media MPAD y MPAD2 (1) y del conector de 54 pins (2). Como se puede ver, son idénticas a las HPAD y HPAD2.
La unidad de control de la Plataforma de conducción automática media (MPAD, MPAD2) es una unidad de control con el software para la conducción parcialmente automatizada de nivel 2. Dicho software incluye el Asistente de dirección y control de carril, el Asistente de atascos de tráfico, etc, facilitando la navegación entre el tráfico. Estos sistemas frenan y aceleran automáticamente y, a diferencia del nivel 1, los sistemas también tienen la capacidad de tomar el control, aunque el conductor sigue siendo responsable del control del vehículo y no se le permite alejarse del volante y la situación del tráfico.
La Plataforma de conducción automática media MPAD incluye dos unidades de control duplicadas (MPAD y MPAD2), que realizan la función de asistente de dirección y control de carril, trabajan independientemente para evitar fallos, se comunican por ethernet y estan integradas ya en la opción 5AU Driving Assistant Professional.
La unidad de control MPAD analiza todas las variables relevantes para la conducción, incluyendo la velocidad, la aceleración y el ángulo de dirección, pero además necesita información de los sensores que detectan si el conductor tiene las manos en el volante, de la cámara que enfoca al conductor para saber lo que hace, si esta dormido o si presta atención a la conducción, de los radares frontales y laterales, y de la cámara de conducción autónoma que detecta el carril de conducción y los obstáculos.
La información de todo el sistema de sensores, radares y cámaras, así como la información del navegador se fusiona en un mapa o modelo de entorno que permite la conducción autónoma del vehículo.
Para cumplir con los requisitos de seguridad en la conducción parcialmente automatizada, las funciones de control central del vehículo se dividen en varias capas de software y hardware, con un nivel de funcionamiento "normal o ordinario" y otro de "reserva o emergencia" para asegurar que el vehículo no continúe circulando autónomamente de manera incontrolada sin conductor humano o incluso en caso de fallo o error del sistema. Para ello els sisteme debe ser capaz de llevar el coche a un estado seguro, tomando el control y frenando el vehículo hasta pararlo.
En funcionamiento normal o ordinario, es el Sistema de frenado integrado IBS (Control de estabilidad dinámica DSC / VIP) el que se encarga de dosificar y gestionar el frenado.
En funcionamiento de reserva o emergencia, es la plataforma de conducción automática media (MPAD/MPAD2) la que se encarga de decidir, ordenar y gestionar el frenado de emergencia.
Sensor central
En el coche hay varios sensores de aceleración instalados en el sensor central:
Sensor de aceleración en el eje longitudinal del vehículo: Este sensor mide la aceleración y el frenado, así como el balanceo alrededor del eje longitudinal del vehículo (izquierda / derecha).
Sensor de aceleración en el eje vertical del vehículo: Este sensor mide los movimientos hacia arriba y hacia abajo, así como el balanceo alrededor del eje vertical del vehículo (adelante / atrás).
Sensor de aceleración en el eje transversal del vehículo: Este sensor mide la aceleración y el frenado, así como el paso alrededor del eje transversal del vehículo (subida y bajada del morro y la cola).
Si la unidad de control del módulo de seguridad contra choques ACSM no recibe ninguna señal de los sensores de aceleración, se utilizan las señales del sensor central para los cálculos y controles del 5DX BMW Personal Pilot L3.
El sensor central está conectado a la unidad de control de la plataforma de conducción automática media (MPAD) y de ella recibe la tensión eléctrica y la tierra.
*Foto del sensor central (1) y la conexión de 4 pins (2).
HAD Módulo de freno
En el coche se instala un sistema de freno secundario o de respaldo, el llamado Módulo de freno HAD, para detener el vehículo de forma segura en todas las situaciones de conducción.
En caso de emergencia, si el Control Dinámico de Estabilidad (DSC) del sistema de frenado primario no puede aumentar la fuerza de frenado, entonces el módulo de freno HAD se hace cargo del frenar el vehículo.
En esta situación, la bomba hidráulica del módulo de freno HAD extrae el líquido de frenos del tanque de expansión y frena el vehículo usando solo los frenos del eje delantero.
Los dos sensores de velocidad de las ruedas delanteras están conectados eléctricamente al módulo de freno HAD, quien reenvía la señal en cables separados redundados al Control Dinámico de Estabilidad (DSC).
*Foto del Módulo de freno HAD (1) y del conector de 46 pins (2).
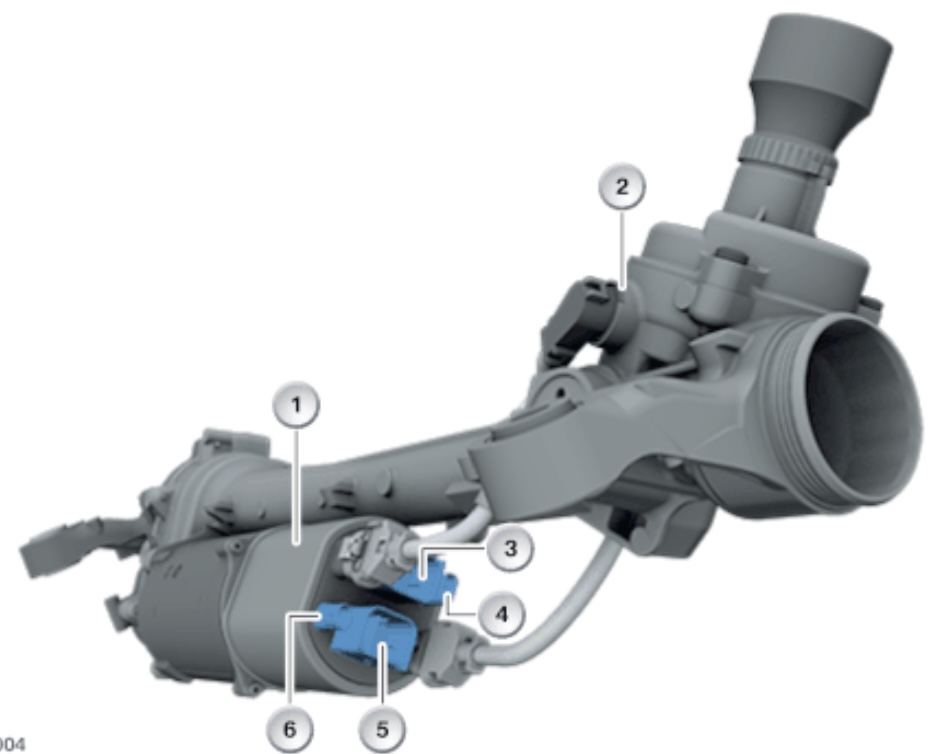
EPS Sistema de dirección electromecánica asistida de dos canales
Para la conducción altamente automatizada 5DX se necesita también que la dirección este redundada y por ello se instala un Sistema de dirección electromecánica asistida de dos canales EPS, para que el coche pueda girar y esquivar obstáculos en cualquier situación.
Por ello, la unidad de control del EPS está conectada al sistema eléctrico por 4 conectores.
Además, para mayor seguridad, hay un sensor de par de dirección conectado a la unidad de control EPS que tiene otras 2 conexiones.
*Foto del sistema de dirección electromecánica asistida de dos canales EPS (1), del sensor de par de dirección (2), y de los conectores de 2 pins (3, 5, 6) y 3 pins (4).
En el siguiente link se puede consultar la 1a Parte de esta guía de sensores, radares y cámaras:
 www.bmwfaq.org
www.bmwfaq.org
Y en el siguiente link se puede consultar la 2a Parte de esta guía de sensores, radares y cámaras:
www.bmwfaq.org
Saludos.
Edito PDF: https://www.bmwfaq.org/attachments/...187169/?hash=5e5d4cfdc63f9b07304aff9994ee6e3c
En este post explicaremos lo que hace cada componente, como funciona y como se relaciona con el resto de componentes.
FRS Sensor de radar frontal
En la parte central de la calandra delantera, se ve una especie de rectángulo, y detrás hay un hueco que puede estar vacío (en el acabado básico o de serie), o equipado con el Sensor de radar frontal FRS, o con el Sensor de radar frontal de largo alcance FRSF.
En el acabado básico o de serie el hueco está vacío.
El coche lleva el radar frontal FRS si equipa una de las siguientes opciones:
- 5AQ Active Guard Plus.
- 5AT Drive Assistant Plus.
- 9QV Preparación para el Driving Assistant Plus.
- 5AU Drive Assistant Professional.
El radar frontal FRS incluye dos componentes dentro del mismo módulo. Por una parte es un sensor o radar que emite ondas de radio para calcular distancias entre el coche y los objetos cercanos y que funciona a 77 GHz de frecuencia, y por la otra es una unidad de control que procesa parte de los datos.
Se utiliza en sistemas de asistencia al conductor como:
- Advertencia de salida de carril con corrección y vuelta al carril, incluido el tráfico de doble sentido
- Asistente de dirección y control de carril, versión básica
- Advertencia de colisión con función de frenado, incluido el tráfico bidireccional
- Advertencia de giro a la izquierda con función de freno en ciudad
- Advertencia de peatones y ciclistas con función de frenado en ciudad, incluido el giro
- Advertencia de cruce
- Control de distancia activo (ACC con función de arranque y parada)
- Asistencia de límite de velocidad
Algunas de las funciones también requieren la Cámara de Conducción Autónoma Básica (ADCAML, coche de serie) y los radares frontales de corta distancia (SRSNVR y SRSNVL, coche con DA Pro).
El radar frontal FRS realiza las siguientes mediciones para detectar objetos:
- Distancia (X, Y)
- Velocidad relativa (X, Y)
- Ancho / Longitud / Altura
- Probabilidad de existencia
- Clasificación (coches de pasajeros, camiones, bicicletas, peatones)
- Propiedad dinámica (en movimiento, estacionario, entrante)
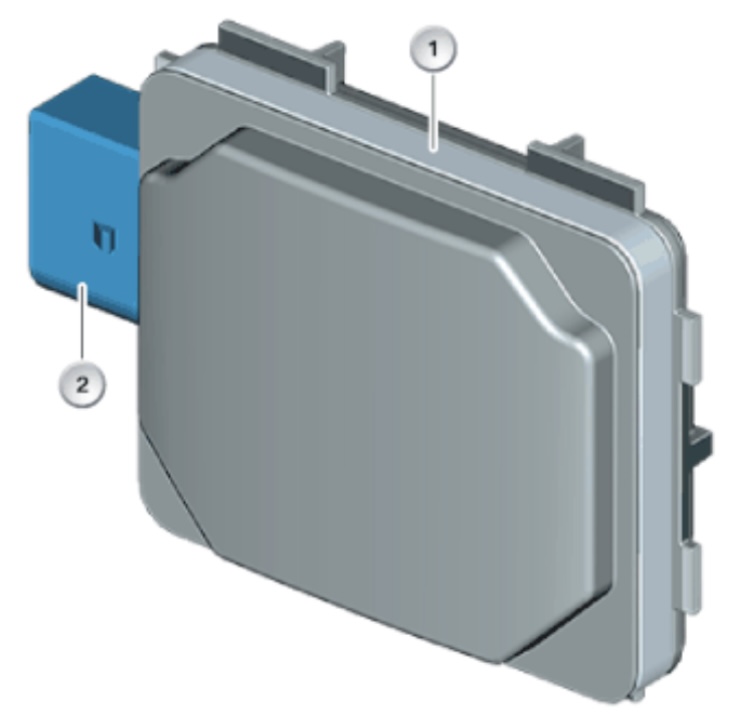
*Foto del radar frontal FRS (1) y del conector de 12 pines (2).
| Variable | Valor Nominal |
| Voltaje de suministro | 8,5 a 17 V |
| Frecuencia de transmisión | 76 a 77 GHz |
| Rango de temperatura | -40°C a 85°C |
FRSF Sensor de radar frontal de largo alcance
En el mismo hueco donde se instala el FRS, también puede instalarse el Sensor de radar frontal de largo alcance FRSF, pero no los dos a la vez.
El coche lleva el radar frontal de largo alcance FRSF solo si equipa la opción 5AU Drive Assistant Professional.
El radar frontal de largo alcance FRSF también incluye dos componentes dentro del mismo módulo. Por una parte es un sensor o radar que emite ondas de radio para calcular distancias entre el coche y los objetos cercanos y que funciona a 77 GHz de frecuencia, y por la otra es una unidad de control que procesa parte de los datos.
Se utiliza en sistemas de asistencia al conductor como:
- Asistente de dirección y control de carril, incluido el asistente de carril
- Detección de tráfico cruzado con protección activa contra colisiones laterales
- Asistente de parada de emergencia
- Asistente de cambio de carril
- Advertencia de colisión frontal con el Asistente de evasión
- Advertencia de colisión frontal con intervención de freno (advertencia de colisión, giro, cruce y peatones)
- Control de distancia (control de crucero activa con parada y arranque)
- Asistencia de límite de velocidad
- Advertencia de conducción incorrecta (contra dirección)
Algunas de las funciones también requieren la Cámara de Conducción Autónoma media (ADCAMM), los radaras frontales de corta distancia (SRSNVR y SRSNVL), la unidad de control del sensor ultrasónico (USS), la Plataforma de conducción automática media (MPAD) y la unidad de control RSNECU.
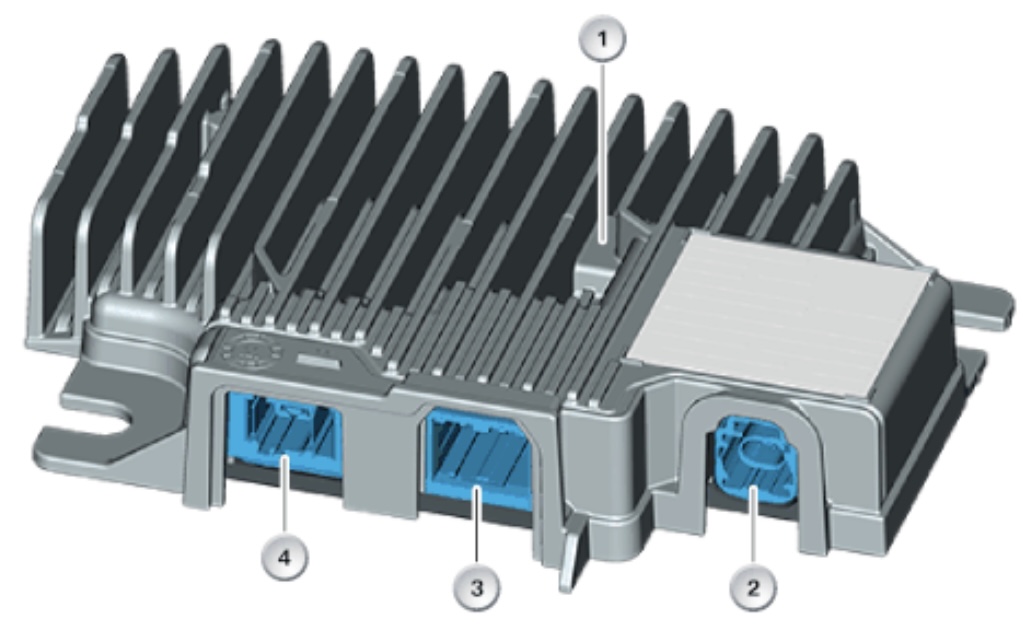
El radar frontal de largo alcance FRSF realiza mediciones para detectar objetos y vehículos, es capaz de detectar los vehículos aparcados y vehículos por delante a una distancia de hasta 250 / 300 m de distancia, en todo tipo de condiciones climáticas y puede realizar un frenado de emergencia.
Todos los datos del FRSF y los de la cámara de conducción autónoma ADCAMM son evaluados por la plataforma de conducción automática media (MPAD), para determinar la información del carril de conducción, las posiciones y los movimientos del vehículo.
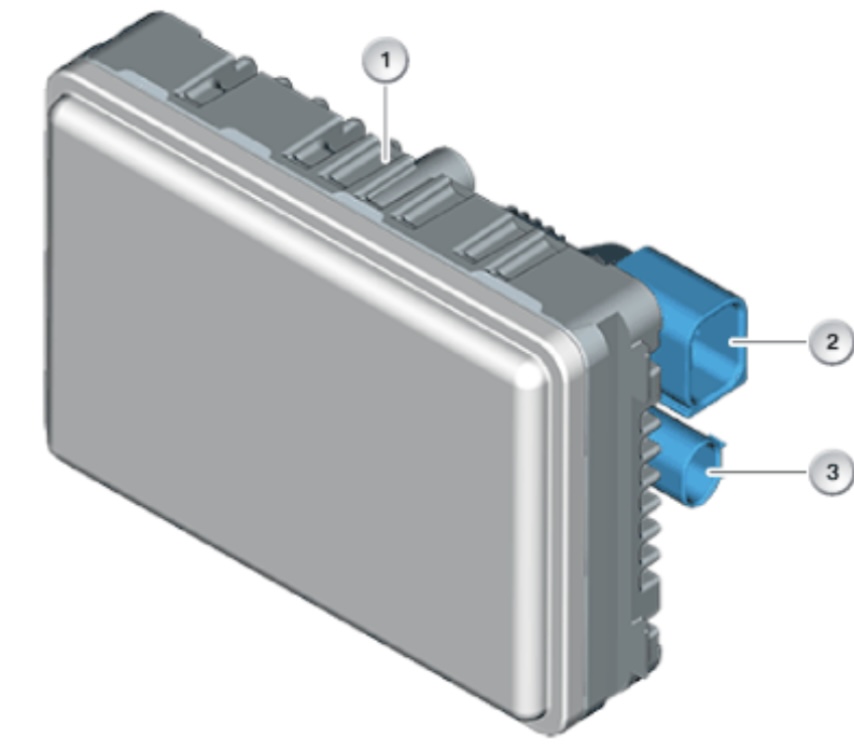
*Foto del radar frontal de largo alcance FRSF (1), y de los conectores de 6 pins (2) y de 2 pins (3).
| Variable | Valor Nominal |
| Voltaje de suministro | 8,5 a 17 V |
| Frecuencia de transmisión | 76 a 77 GHz |
| Rango de temperatura | -40°C a 85°C |
SRSNVL y SRSNVR Sensores de radar lateral de corta distancia delantero izquierdo y derecho
También en la parte delantera del coche pero debajo de los faros y en la parte más exterior, hay opcionalmente dos radares idénticos, uno a cada lado, el Radar frontal lateral izquierdo de corto alcance SRSNVL y el Radar frontal lateral derecho de corto alcance SRSNVR. Además, cuando lleva estos dos radares necesita una Unidad de control, la RSNECU.
Para tener estos dos radares SRSNVL y el SRSNVR y la unidad de control RSNECU, el coche debe equipar la opción 5AU Drive Assistant Professional.
Estos dos radares de corto alcance funcionan con una frecuencia de 77 GHz y se pueden configurar para funcionar de dos maneras:
Con un ancho de banda de 425 MHz, y un rango de visión de 42 metros aprox.
O con un ancho de banda de 175 MHz, y un rango de visión de 90 metros aprox.
Y se utilizan en sistemas de asistencia al conductor como:
Asistente de dirección y control de carril, incluido el asistente de carril
Detección de tráfico cruzado con protección activa contra colisiones laterales
Asistente de parada de emergencia
Asistente de cambio de carril
Advertencia de colisión frontal con el Asistente de evasión
Advertencia de colisión frontal con intervención de freno (advertencia de colisión, giro, cruce y peatones)
Control de distancia (control de crucero activa con parada y arranque)
Asistencia de límite de velocidad
Advertencia de conducción incorrecta (contra dirección)
Advertencia de salida y tráfico frontal
Advertencia de tráfico frontal cruzado con intervención de freno
Algunas de las funciones también requieren la Cámara de Conducción Autónoma media (ADCAMM), los radaras frontales de corta distancia (SRSNVR y SRSNVL), la unidad de control del sensor ultrasónico (USS), la plataforma de conducción automática media (MPAD), el radar frontal de largo alcance (FRSF) y la unidad de control RSNECU.
Los radares laterales de corta distancia delanteros SRSNVR y SRSNVL siempre se utilizan junto con los radares laterales de corta distancia traseros HRSNL y HRSNR. En este caso, el HRSNR actua como unidad de control maestra.
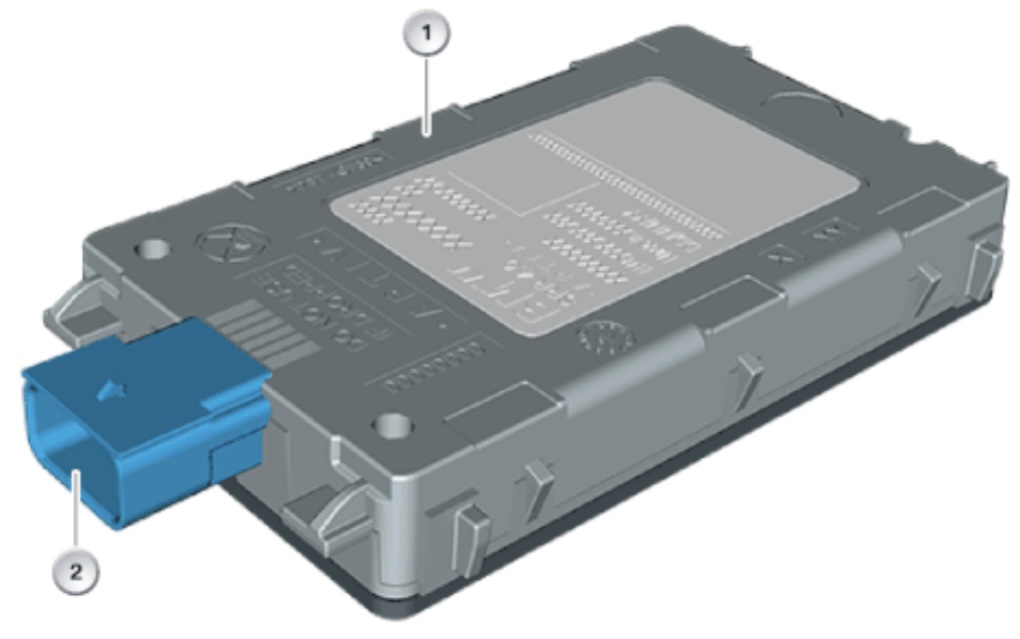
*Foto de los radares laterales de corta distancia delantero izquierdo (SRSNVL) y derecho (SRSNVR) (1), y del conector de 12 pines (2).
| Variable | Valor Nominal |
| Voltaje de suministro | 9 a 18 V |
| Frecuencia de transmisión | 76 a 77 GHz |
| Rango de temperatura | -40 a 85 °C |
RSNECU Unidad de control del sensor de radar de alcance cercano
La unidad de control del radar de alcance cercano (RSNECU) se instala con el equipo opcional SA5AU Drive Assistant Professional y se utiliza en sistemas de asistencia al conductor como:
Asistente de dirección y control de carril, incluido el asistente de carril
Asistente de parada de emergencia sin cambio de carril
Asistente de cambio de carril
Asistente automático de límite de velocidad, con aviso en pantalla del límite de velocidad, e indicador de adelantamiento no adecuado y preaviso
Control de crucero activo con función de arranque y parada
Advertencia de señal de tráfico de cruce
Advertencia de sentido equivocado para autopistas (contradirección)
Asistente de evitación
Advertencia de tráfico cruzado delantero y trasero con función de frenado
Estas funciones necesitan la Cámara de conducción autónoma media (ADCAMM), la unidad de control del sensor ultrasónico (USS), la plataforma de conducción automática media (MPAD), el radar lateral de corta distancia delantera izquierda (SRSNVL) y derecho (SRSNVR), así como el radar frontal de largo alcance (FRSF).
La unidad de control de alcance cercano (RSNECU) es la unidad de control maestra para los siguientes sensores de radar:
Radar lateral de corta distancia delantero izquierdo (SRSNVL) y radar lateral de corta distancia delantero derecho (SRSNVR)
Radar trasero de corta distancia izquierdo (HRSNL) y radar trasero de corta distancia derecho (HRSNR)
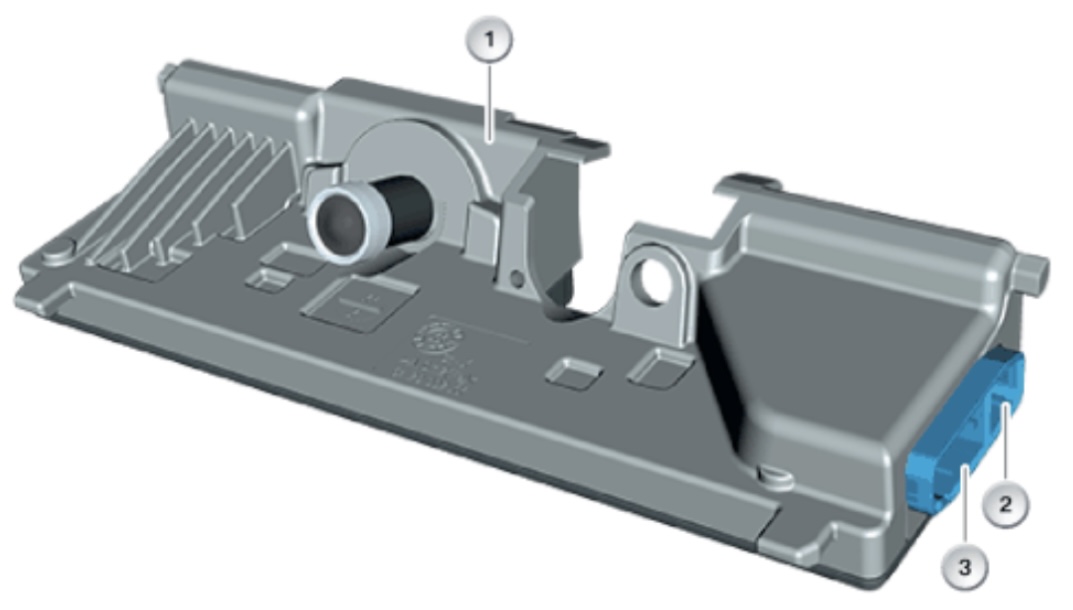
*Foto de la unidad de control del radar de alcance cercano RSNECU (1), y del conector de 20 pins (2).
| Variable | Valor Nominal |
| Voltaje de suministro | De 9 a 16 V |
| Rango de temperatura | -40°C a 85°C |
ADCAML Cámara de conducción autónoma de corto alcance
En el parabrisas delantero, a la altura del retrovisor central y debajo del cristal, el coche tiene espacio para un módulo de sensores y cámaras. Para saber que módulo lleva, la clave está en la opción 5AU Drive Assistant Professional.
Si el coche no lleva DA Pro, utiliza el módulo ADCAML (cámara de conducción autónoma de corto alcance).
Si el coche si lleva el DA Pro, entonces utiliza el módulo ADCAMM (cámara de conducción autónoma de medio alcance).
El módulo ADCAML integra una unidad de control básica y una cámara de conducción autónoma de corto alcance “básica” (Autonomous Driving Camera Low) en el hueco que hay encima del retrovisor central. El módulo tiene espacio para una segunda cámara para realidad aumentada “básica” (Camera augmented reality low).
El módulo ADCAML se utiliza para visualizar en sistemas de asistencia al conductor como:
Control de crucero activo con función de arranque y parada (Stop&Go)
Advertencia de salida de carril
Asistente de luz de carretera
Limitación de velocidad máxima
Advertencia de colisión
Advertencia de tráfico al girar a la izquierda
Prohibición de adelantamiento
Prevención de accidentes de tráfico urbano
Protección preventiva para peatones
Asistente de atascos de tráfico
Para ello, se utilizan las siguientes características de identificación:
Detección de objetos: Los vehículos, motocicletas, bicicletas y peatones se reconocen analizando las imágenes de la cámara frontal.
Detección de marcas de carril: La cámara frontal permite reconocer las marcas de carril de las imágenes de la cámara y relacionar su forma y posición.
Detección de luz: La cámara frontal detecta la luz de otros usuarios de la carretera (vehículos, bicicletas, peatones) para apagar y encender las luces delanteras del coche
*Foto de la cámara de conducción autónoma de corto alcance ADCAML (1) y de los conectores de 4 pins (2) y 12 pins (3).
| Variable | Valor Nominal |
| Voltaje de suministro | De 9 a 16 V |
| Rango de temperatura | -40°C a 85°C |
La calibración de la unidad de control ADCAML se realiza mientras se conduce, y necesita al menos 5 kilómetros para calibrarse. También se puede recalibrar en el taller.
ADCAMM Cámara de conducción autónoma de medio alcance
Como hemos dicho antes, si el coche lleva el Drive Assistant Pro, entonces utiliza el módulo ADCAMM (cámara de conducción autónoma de medio alcance), en el mismo hueco donde va el ADCAML (de corto alcance), al cual sustituye.
El módulo ADCAMM incluye el propio módulo, más potente y por tanto instalado en el pilar A del lado del pasajero delantero (copiloto), y una cámara de conducción autónoma de medio alcance (Autonomous Driving Camera Mid) con un ángulo de visión de 120 grados que se aloja en el hueco encima del retrovisor y debajo del parabrisas. El hueco tiene espacio para una segunda cámara para realidad aumentada media y superior (Camera augmented reality mid/high).
La unidad de control de la cámara de conducción autónoma media (ADCAMM) forma parte de un gran sistema descentralizado de asistencia al conductor que gestiona y controla todas las funciones visuales de la cámara de conducción autónoma delantera ADCAMM, las de protección activa contra colisiones laterales, las que advierten al conductor en caso de riesgo de colisión desde el frente, y funciona como enlace entre el procesador de imágenes y la comunicación a través de Ethernet.
Las siguientes características de identificación se tienen en cuenta en una unidad de control del ADCAMM para la conducción automatizada:
Marcas viales
Objetos (vehículos, peatones, animales)
Espacio libre delante del vehículo
Señales de tráfico
Estado de la superficie de la carretera
Vista previa del curso de la carretera
Vista previa del curso de las marcas de carril
Velocidad de conducción propia
Puntos de referencia visuales
*Foto de la cámara de conducción autónoma media ADCAMM (1) y de las conexiones de 2 pins (2) y 20 pins (3).
La calibración de la unidad de control ADCAMM se realiza mientras se conduce, y necesita menos de 5 kilómetros para calibrarse.
HRSNL Sensor de radar trasero de corta distancia izquierdo y HRSNR derecho
En la parte trasera del coche, debajo de los faros traseros y en la parte más exterior, hay opcionalmente dos radares idénticos, uno a cada lado, el Radar trasero izquierdo de medio alcance HRSNL y el Radar trasero derecho de medio alcance HRSNR.
Estos radares HRSNL y HRSNR son idénticos a los SRSNVL y el SRSNVR delanteros, y todos funcionan con una frecuencia de 77 GHz y se pueden configurar para funcionar de dos maneras:
Con un ancho de banda de 425 MHz, y un rango de visión de 42 metros aprox.
O con un ancho de banda de 175 MHz, y un rango de visión de 90 metros aprox.
Los 4 necesitan la Unidad de control RSNECU para que los gestione y controle.
Para tener estos dos radares HRSNL y HRSNR y la unidad de control RSNECU, el coche debe equipar la opción 5AS Drive Assistant “básico” o la 5AU Drive Assistant Professional.
Los radares HRSNL y HRSNR se utilizan en sistemas de asistencia al conductor como:
Asistente de dirección y guía de carril
Asistente de cambio de carril
Advertencia de cambio de carril con retorno activo
Advertencia de tráfico cruzado trasero con función de frenado
Advertencia de colisión trasera
Advertencia de salida en la parte trasera
Asistente de parada de emergencia
Los sensores de radar traseros de corta distancia también se pueden utilizar como una solución independiente de los delanteros si no estan instalados.
Si se instala la unidad de control del radar de alcance cercano (RSNECU), esta será la unidad de control principal para los radares de alcance cercano delanteros y traseros, y los HRSNR y HRSNL seran unidades de control esclavas.
Si no se instala la unidad de control del radar de alcance cercano (RSNECU), el HRSNR actúa como unidad de control maestra y la HRSNL como esclava.
*Foto de los radares laterales de corta distancia trasero izquierdo (HRSNL) y derecho (HRSNR) (1), y del conector de 12 pines (2).
| Variable | Valor Nominal |
| Voltaje de suministro | 9 a 18 V |
| Frecuencia de transmisión | 76 a 77 GHz |
| Rango de temperatura | -40 a 85 °C |
RVC Cámara de visión trasera
La cámara de visión trasera RVC, que se utiliza para la marcha atrás, está incluida en la opción 5DM Parking Assistant “básico” y está incluida en un único módulo que agrupa una única cámara y la unidad de control que la gestiona.
Se conecta al BCP por ethernet y está codificada para evitar una confusión con las otras cámaras.
La cámara de visión trasera (RVC) ayuda en el aparcamiento marcha atrás y en las maniobras, mostrando las imágenes en la pantalla central del coche. En ella se muestran también las líneas de orientación para calcular las distancias, el radio de giro, los obstáculos, hay una función de zoom cuando hay un remolque enganchado y se miden los ángulos de giro para el asistente de remolque.
La cámara puede alcanzar hasta 100 metros de distancia, con un ángulo horizontal de 180° (grados) y uno vertical 100 ° (grados).
Se activa cuando se pone la marcha atrás o se presiona la tecla de ayuda al aparcamiento, y se apaga cuando el coche alcanza 20 metros hacia adelante o supera los 20 km/h.
*Foto de la empuñadura para abrir y cerrar el portón trasero (1), de la cámara de visión trasera RVC (3), del inyector a chorro para lavar la cámara (2) y del conector de 8 pins (4).
| Variable | Valor Nominal |
| Voltaje de suministro | De 9 a 16 V |
| Ángulo de visión horizontal máximo | 180 ° (grados) |
| Ángulo de visión vertical máximo | 100 ° (grados) |
| Velocidad de procesamiento de datos de imagen | 40 MBit/s |
| Rango de temperatura | -40 °C a 105 °C |
En algunas ocasiones el sistema puede avisar que la cámara está sucia, y si la lente está sucia puede que la imágen no se vea bien y que la unidad de control no pueda evaluar correctamente las distancias y las imágenes, e incluso provocar un fallo en el sistema. Para evitarlo, lo mejor es mantener limpia la lente de la cámara.
Sensores ultrasónicos
El asistente de aparcamiento ayuda a aparcar en espacios de aparcamiento paralelo a la vía (en línea) y perpendiculares a la carretera (en batería), así como ayuda a salir de una Plaza de aparcamiento sin peligro.
Para esto, el Parking Assistant mide los posibles espacios de aparcamiento cuando se conduce a una velocidad inferior a 36 km/h sin necesidad de activación previa. El espacio de aparcamiento se muestra en la pantalla central y el asistente se hace cargo de todo el control del vehículo, incluyendo dirección, pedal del acelerador, freno y selección de marchas. El conductor solo es responsable de monitorizar la maniobra de estacionamiento y actuar en caso de energencia.
Con la opción 5DM Parking Assistant “básico” los 12 sensores o radares ultrasónicos (6 en la parte delantera y 6 en la trasera) están conectados y gestionados por la unidad de control del sensor ultrasónico (USS).
Con la opción 5DN Parking Assistant Plus o 5DW Parking Assistant Pro los 12 sensores ultrasónicos (6 en la parte delantera y 6 en la trasera) están conectados a la Unidad de control de estacionamiento automatizado con cámara ultrasónica (UCAP).
Las mediciones de estos sensores o radares se utilizan en:
La vista asistida, la visualización de distancias y la guía de conducción, incluyendo un esquema en la pantalla del conductor y la vista superior del vehículo.
La visualización mejorada de los espacios de aparcamiento gracias a la representación de medidas a escala en pantalla.
Los avisos acústicos (por ejemplo, un pitido sonoro cuando se encuentra un espacio de aparcamiento) y la superposición de las imágenes de la cámara y las guías, que se pueden configurar.
El Parking Assistant utiliza sensores o radares ultrasónicos para realizar la medición de distancias entre el vehículo y los objetos que lo rodean, dentro del alcance de los sensores.
Estos sensores ultrasónicos emiten pulsos ultrasónicos que son reflejados por los obstáculos y que regresan al sensor (impulsos de eco) que los recibe, los amplifica y transforma en una señal digital que envia a la unidad de control USS o la UCAP.
La unidad de control USS o la UCAP enciende los sensores ultrasónicos cuando el Control de Distancia del Aparcamiento (PDC) está activo, que pueden estar en modo combinado de transmisión y recepción, o en modo de solo recepción.
En el modo de solo recepción, un sensor ultrasónico puede captar los impulsos de eco enviados por los sensores vecinos, De esta forma la unidad de control USS o la UCA, pueden evaluar las señales de hasta 3 sensores ultrasónicos ("triangulación" de una zona o sección contigua) para calcular la distancia mínima entre el vehículo y el objeto sin chocar.
*Foto de los sensores o radares ultrasónicos (1), el diafragma (2) y el conector de 3 pins (3). El hecho de que el conector (3) esté por un lado (A, radial) o por el otro (B, axial) depende de la posición que el sensor ocupa en el parachoques.
Los sensores o radares ultrasónicos de los parachoques delantero y trasero son todos idénticos, y tienen un diafragma más pequeño que los sensores normales. El diafragma siempre está pintado del color de la carroceria, por lo que hay un código para cada color aunque sean idénticos.
El sensor ultrasónico incluye una memoria en su electrónica que se puede programar y codificar para ajustar la sensibilidad de la recepción del eco. También incluye una Unidad transceptora piezocerámica detrás del diafragma y un componente electrónico de evaluación.
| Variable | Valor Nominal |
| Voltaje de suministro | De 9 a 16 V |
| Frecuencia ultrasónica | 50 kHz |
| Rango de alcance | 250 cm |
| Rango de temperatura | -40 °C a 80 °C |
USS Unidad de control del sensor ultrasónico
Tal y como hemos comentado en el punto anterior, si el coche está equipado con la opción 5DM Parking Assistant “básico”, esta incluye la Unidad de control del sensor ultrasónico (USS), pero si el coche está equipado con la opción 5DN Parking Assistant Plus o 5DW Parking Assistant Pro, entonces incluye la Unidad de control de estacionamiento automatizado con cámara ultrasónica (UCAP), que tiene mayor capacidad de procesamiento.
La Unidad de control de sensor ultrasónico USS controla y gestiona los 12 sensores de los parachoques, está incluida en la opción 5DM Parking Assistant “básico” y sirve de ayuda a la hora de aparcar.
Si el coche no lleva la opción 5DM Parking Assistant “básico” pero si lleva la opción 3AG Reverse Assist Camera RVC, la USS es capaz de entenderse y coordinarse con la cámara de visión trasera RVC.
Gracias a la USS es posible maniobrar en espacios de aparcamiento longitudinales (en línea) y transversales (en batería).
Según el modelo de vehículo, la unidad de control USS se aloja debajo del cuadro de mandos o en el maletero.
La unidad de control USS permite:
La detección automática de un espacio de aparcamiento suficientemente grande
El aparcamiento automático
La prevención efectiva de daños en el aparcamiento
El asistente de remolque
El asistente de marcha atrás
Todo el sistema se puede configurar con:
8 canales (4 sensores ultrasónicos delanteros, y 4 traseros),
12 canales (6 sensores ultrasónicos delanteros, y 6 traseros, 2 de los cuales en el lateral).
Por debajo de los 35 km/h y con un espacio lateral libre máximo de 1,5 m entre nuestro coche y la fila de los coches aparcados en línea, los sensores o radares ultrasónicos muestran al conductor cada posible espacio de aparcamiento en la pantalla central.
El asistente de aparcamiento automático proporciona asistencia activa para el aparcamiento cuando el intermitente de ese lado está puesto y se pulsa el botón de asistencia de estacionamiento, seleccionando la marcha adelante y la marcha atrás, y girando el volante a izquierda y derecha cuando sea necesario.
Cada error o paro de emergencia de la maniobra se guarda en la memoria de fallos de la unidad de control del USS y el sistema comprueba si la maniobra se puede reanudar. Si es necesario, el conductor puede reanudar la maniobra manualmente inmediatamente.
El sonido de audio se puede apagar o reducir temporalmente solo en la maniobra actual o configurar para que lo haga siempre en todas las maniobras de aparcamiento automático.
El control automático de distancia de aparcamiento (PDC) facilita el aparcamiento y la salida de espacios de aparcamiento estrechos, y se activa automáticamente cuando el coche se acerca lentamente a un obstáculo, o para evitar colisiones y/o reducir la gravedad del accidente.
El sonido de alerta suena en función de la distancia, el ángulo de dirección, y el riesgo existente de colisión. Y en la pantalla central se visualizan las distancias y la trayectoria del vehículo en una vista superior esquemática del vehículo.
*Foto de la Unidad de control del sensor ultrasónico USS (1) y el conector de 26 pubs (2).
| Variable | Valor Nominal |
| Voltaje de suministro | De 9 a 16 V |
| Rango de temperatura | -40 a 90 °C |
La unidad de control USS puede registrar los fallos y errores, pero no puede determinar si los sensores ultrasónicos están instalados, conectados incorrectamente, o si la zona del parachoques próxima al sensor está dañada. Esto puede provocar que no se detecten plazas de aparcamiento pequeñas, que el vehículo pase muy cerca o muy lejos del vehículo delantero, que quede aparcado muy lejos o muy cerca de la acera, o que quede aparcado en diagonal en vez de paralelo a la acera.
De la USS solo hay una versión, que se instala desde el 01/11/2023, pero de la UCAP hay 6 versiones diferentes, aunque son solo 5 generaciones.
UCAP Unidad de control de estacionamiento automatizado con cámara ultrasónica
La Unidad de Estacionamiento automatizado con cámara ultrasónica UCAP controla y gestiona los 12 sensores de los parachoques, y las 4 cámaras de ayuda para aparcar (delante, detrás y en los dos retrovisores exteriores). Está incluida en las opciones 5DN Parking Assistant Plus y 5DW Parking Assistant Professional. La UCAP también sirve de ayuda a la hora de aparcar pero tiene mayor capacidad de procesamiento que la USS.
Los coches que tengan la opción 6DR BMW Drive Recorder también necesitan la UCAP para poder funcionar.
Las 4 cámaras que están conectadas a la unidad de control UCAP a través de SerDes son:
La cámara de aparcamiento autónomo frontal, en la calandra y el parachoques delantero
La cámara de aparcamiento autónomo trasero, en el portón trasero
La cámara de aparcamiento autónomo izquierdo, en el retrovisor exterior izquierdo
La cámara de aparcamiento autónomo derecho, en el retrovisor exterior derecho
La unidad de control UCAP es un sistema de asistencia de aparcamiento con visión envolvente que proporciona funciones extendidas para el aparcamiento automatizado, entre ellas:
Aparcamiento automatizado
Control de distancia de aparcamiento
Asistente de remolque
Visualización de la maniobra de aparcamiento
Grabación de la maniobra de aparcamiento
Transmisión de los datos de las cámaras
La unidad de control UCAP monitoriza el estado de las cámaras y, en el caso de detectar suciedad activa la limpieza de las cámaras delantera y trasera.
*Foto de la Unidad de control de aparcamiento automatizado con cámara ultrasónica UCAP (1), y los conectores de 4 pins (2), 2 pins (3) y 32 pins (4).
| Variable | Valor Nominal |
| Voltaje de suministro | De 9 a 16 V |
| Rango de temperatura | -40 a 75 °C |
Si se sustituye la unidad de control UCAP o una de las cámara a ella conectada, es necesario conducir de 1 a varios kilómetros, a una velocidad de entre 1 y 50 km/h y un ángulo de entre -1° y +1°, es decir en línea lo más recta posible, para recalibrar las cámaras y la unidad de control.
De la USS solo hay una versión desde el 01/11/2023 en adelante, pero de la UCAP hay 6 versiones diferentes, aunque puede que sean solo 5 generaciones o menos.
La que podríamos llamar primera versión, generación o UCAP 1 (B3F) se instaló desde el 01/11/2023.
Las que podríamos llamar segunda generación o UCAP 2a (B4C) y UCAP 2b (B52) se instalaron desde el 01/03/2024. Seguramente son el mismo modelo pero fabricado por dos proveedores distintos.
La que podríamos llamar tercera generación o UCAP 3 (B56) se instaló desde 01/07/2024.
La que podríamos llamar cuarta generación o UCAP 4 (B60) se instaló desde 01/11/2024 y todavía está vigente.
Y finalmente la quinta generación o UCAP 5 (B65) se instaló desde 01/03/2025 y también está vigente.
El problema puede venir porque algunas de estas versiones se solapan en el tiempo, y es difícil saber que modelo exacto lleva cada coche.
Analizando las diferentes versiones se deduce que la UCAP 1 no es compatible con la opción Parking Assitant Pro, y que las UCAP 2 y posteriores (2, 3, 4, 5), que se instalaron a partir del 01/03/2024 si son compatibles con PA Pro.
Es por este motivo que los coches fabricados antes del 01/03/2024 no son compatibles con el 5DW Parking Assistant Pro, aunque lleven UCAP.
En este documento lo hemos simplificado un poco para que se entienda mejor, y decimos “la que podríamos llamar…” porque es una nomenclatura nuestra para distinguirlas más facilmente, y no sabemos cual es la nomenclatura exacta que utiliza BMW. Y seguramente no son 5 generaciones diferentes reales sino actualizaciones.
LiDAR Light Detection and Ranging
La importancia del LiDAR estriba en que los coches que incluyen conducción autónoma lo necesitan para poder funcionar, dado que tiene una gran capacidad de procesar muchos datos y a le vez de hacerlo muy rápido.
El LiDAR es parecido al radar, pero en vez de emitir ondas de radio emite haces de luz para calcular distancias entre el coche y los objetos cercanos.
Actualmente, la mayoría de coches BMW no llevan LiDAR, pero los coches que tienen la opción 5DX BMW Personal Pilot L3 incluyen el LiDAR porque lo necesitan para la conducción autónoma de nivel 3.
Hay que tener en cuenta que la opción 5DX BMW Personal Pilot L3 tiene un precio de unos 5.100 Euros aprox en el Serie 7.
LiDAR significa Light Detection and Ranging o también Laser Imaging Detection and Ranging, que se puede traducir por detección y rango de luz, y es un escáner láser que determina el tiempo que pasa entre la emisión de un rayo láser, el rebote en un objeto y la vuelta hasta el punto de origen.
Con miles de mediciones se puede crear un mapa tridimensional (3D) o nube de puntos del entorno para determinar los posibles obstáculos, medir las distancias y velocidades de un objeto, medir la velocidad de un objetivo, determinar la ruta que debe seguir el vehículo y controlar la conducción autónoma automatizada. También se pueden recalibrar los sensores y cámaras, detectar si estan sucios y limpiarlos de forma automática.
Como hemos comentado, el LiDAR solo esta disponible dentro de la opción 5DX, y esta compuesto por:
Una unidad de control central frontal (LiDARVM o LiDARFC), que se encarga de procesar la información y generar la nube de puntos.
Y 3 sensores iguales: el sensor frontal (LiDAR), el sensor de radar lateral izquierdo de alcance cercano (SRSNML) y el sensor de radar lateral derecho de alcance cercano (SRSNMR).
La conducción autónoma altamente automatizada requiere todo un sistema de sensores, unidades de control y una arquitectura redundada especial, incluyendo el sistema eléctrico, para evitar posibles errores, fallos y colusiones. Entre ellos, los módulos siguientes:
La unidad de control del LiDAR (LiDARVM o LiDARFC), con un sensor separado en la parte central delantera (LiDAR) y dos en los laterales (SRSNML ySRSNMR).
La plataforma de conducción automática alta (HPAD, HPAD2) como unidad de control central para realizar todos los cálculos necesarios para la conducción autónoma.
La plataforma de conducción automática media (MPAD) que hace de backup o sustituto del HPAD en caso de fallo durante la conducción autónoma "BMW Personal Pilot L3".
La cámara de conducción autónoma media (ADCAMM) con una cámara frontal.
El sensor de radar frontal de largo alcance (FRSF).
La unidad de control de sensores o radares de alcance cercano (RSNECU) con los sensores o radares conectados a ella.
La unidad de control de estacionamiento automatizado con cámara ultrasónica (UCAP) con las cámaras conectadas a ella.
El mapa de navegación de alta resolución descargado de la nube por la caja de comunicación telemática (TCB), y que se superpone al mapa de mediciones realizado PIR el LiDARVM.
El sensor central con los sensores de aceleración redundantes de la unidad de control del módulo de seguridad contra choques (ACSM).
El suministro de energía eléctrica seguro redundado por dos conexiones diferentes.
La batería adicional (BATTHAF) para la conducción automatizada.
El módulo de freno de reserva o backup (HAD) que actua en caso de fallo del freno principal.
La unidad de control de la dirección asistida electrónica (EPS) de reserva o backup que actua en caso de fallo de la dirección principal.
*Foto de la unidad de control central LiDARFC o LiDARVM (1), y conectores de 2 pins SerDes (2), eléctrico de 8 pins (3) y ethernet de 2 pins (4).
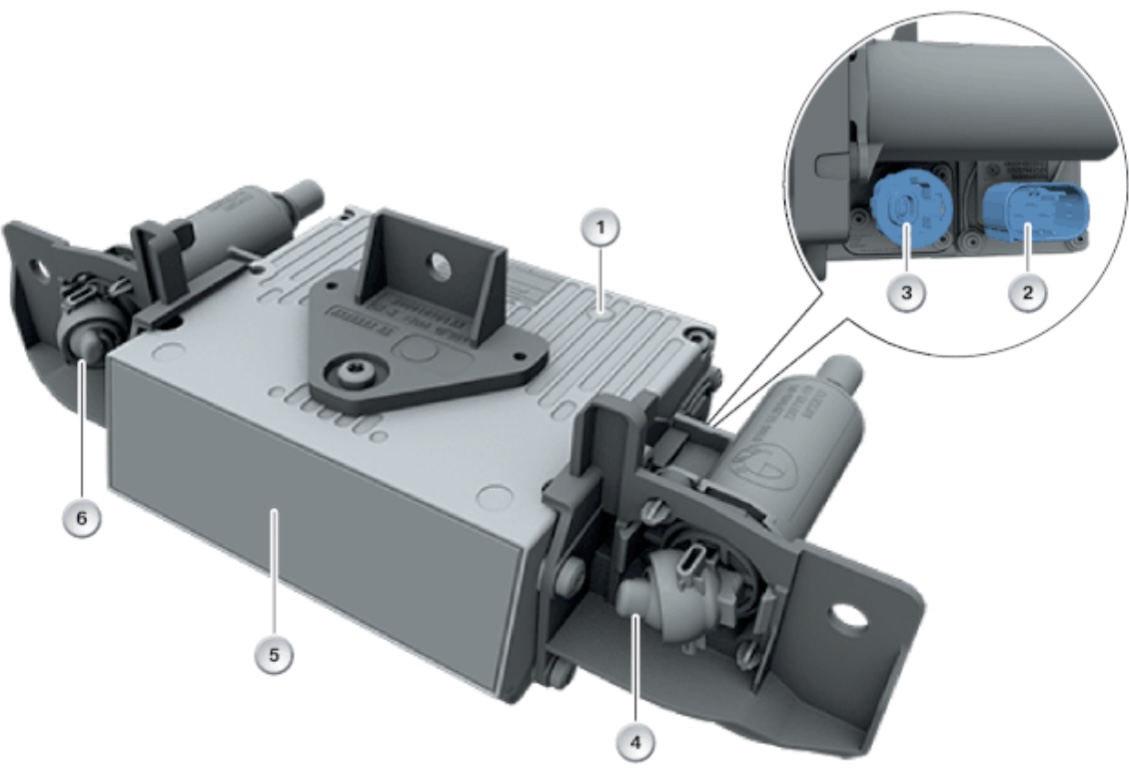
El sensor LiDAR emite haces de luz láser y recibe la luz reflejada en los objetos. Los resultados son las llamadas nubes de puntos, que se transmiten a la unidad de control LiDARFC o LiDARVM.
La superfície donde se recibe la luz es de cristal y tiene un elemento calefactor controlado por el LiDAR que mantiene el cristal libre de hielo. Es el LiDAR el que detecta el posible hielo y determina la potencia necesaria, pero es la unidad de control LiDARVM o LiDARFC quien emite la orden de encendido y apagado.
Las boquillas de limpieza están instaladas a los lados del sensor LiDAR y del cristal de protección y es la unidad de control MPAD la que las enciende y apaga a través de la unidad de control BCP.
*Foto del sensor LiDAR (1), del conector de 6 pins (2) al sistema eléctrico, del conector de 2 pins SerDes (3), del cristal de recepción de los haces de luz y de protección (5) y de las boquillas de limpieza (4 y 6).
| Variable | Valor |
| Voltaje de suministro | 8,5 a 17 voltios |
| Rango de temperatura | -40 a 85 °C |
HPAD y HPAD2 Plataformas de conducción automática alta
Hay dos plataformas de conducción automática alta trabajando simultáneamente: la HPAD y la HPAD2. Estas hacen los cálculos por separado y los ponen en común. Si coinciden, perfecto. Si no coinciden, se desconectan y toma el mando la MPAD, que está de respaldo o backup.
Se recuerda que las unidades de control HPAD y HPAD2 solo se instalan si el coche tiene la opción 5DX BMW Personal Pilot L3.
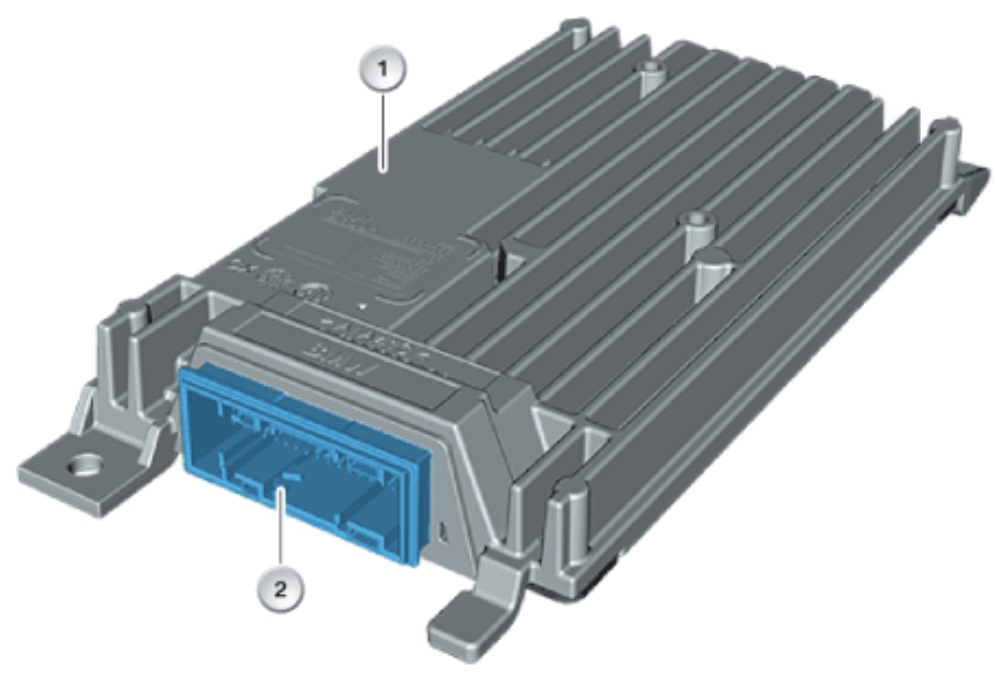
*Foto de las plataformas de conducción automática alta HPAD y HPAD2 (1) y del conector de 54 pins (2).
MPAD y MPAD2 Plataformas de conducción automática media
Como hemos comentado, las unidades de control MPAD y MPAD2 solo se instalan junto a los HPAD y HPAD2 si el coche tiene la opción 5DX BMW Personal Pilot L3, y se instalan como reserva para el caso que la HPAD falle.
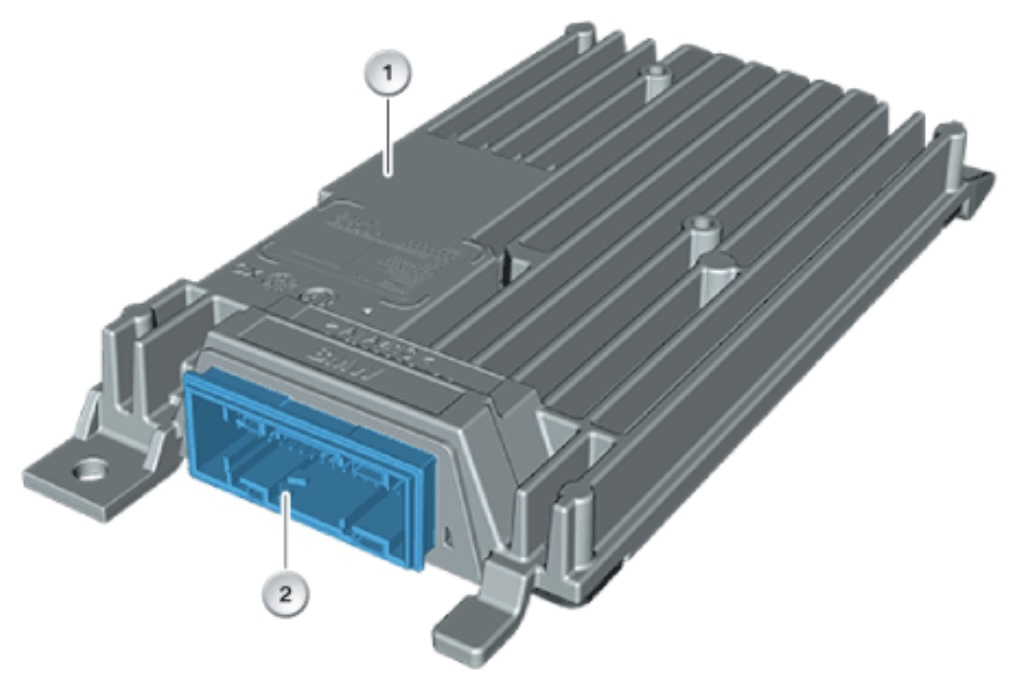
*Foto de las plataformas de conducción automática media MPAD y MPAD2 (1) y del conector de 54 pins (2). Como se puede ver, son idénticas a las HPAD y HPAD2.
La unidad de control de la Plataforma de conducción automática media (MPAD, MPAD2) es una unidad de control con el software para la conducción parcialmente automatizada de nivel 2. Dicho software incluye el Asistente de dirección y control de carril, el Asistente de atascos de tráfico, etc, facilitando la navegación entre el tráfico. Estos sistemas frenan y aceleran automáticamente y, a diferencia del nivel 1, los sistemas también tienen la capacidad de tomar el control, aunque el conductor sigue siendo responsable del control del vehículo y no se le permite alejarse del volante y la situación del tráfico.
La Plataforma de conducción automática media MPAD incluye dos unidades de control duplicadas (MPAD y MPAD2), que realizan la función de asistente de dirección y control de carril, trabajan independientemente para evitar fallos, se comunican por ethernet y estan integradas ya en la opción 5AU Driving Assistant Professional.
La unidad de control MPAD analiza todas las variables relevantes para la conducción, incluyendo la velocidad, la aceleración y el ángulo de dirección, pero además necesita información de los sensores que detectan si el conductor tiene las manos en el volante, de la cámara que enfoca al conductor para saber lo que hace, si esta dormido o si presta atención a la conducción, de los radares frontales y laterales, y de la cámara de conducción autónoma que detecta el carril de conducción y los obstáculos.
La información de todo el sistema de sensores, radares y cámaras, así como la información del navegador se fusiona en un mapa o modelo de entorno que permite la conducción autónoma del vehículo.
Para cumplir con los requisitos de seguridad en la conducción parcialmente automatizada, las funciones de control central del vehículo se dividen en varias capas de software y hardware, con un nivel de funcionamiento "normal o ordinario" y otro de "reserva o emergencia" para asegurar que el vehículo no continúe circulando autónomamente de manera incontrolada sin conductor humano o incluso en caso de fallo o error del sistema. Para ello els sisteme debe ser capaz de llevar el coche a un estado seguro, tomando el control y frenando el vehículo hasta pararlo.
En funcionamiento normal o ordinario, es el Sistema de frenado integrado IBS (Control de estabilidad dinámica DSC / VIP) el que se encarga de dosificar y gestionar el frenado.
En funcionamiento de reserva o emergencia, es la plataforma de conducción automática media (MPAD/MPAD2) la que se encarga de decidir, ordenar y gestionar el frenado de emergencia.
Sensor central
En el coche hay varios sensores de aceleración instalados en el sensor central:
Sensor de aceleración en el eje longitudinal del vehículo: Este sensor mide la aceleración y el frenado, así como el balanceo alrededor del eje longitudinal del vehículo (izquierda / derecha).
Sensor de aceleración en el eje vertical del vehículo: Este sensor mide los movimientos hacia arriba y hacia abajo, así como el balanceo alrededor del eje vertical del vehículo (adelante / atrás).
Sensor de aceleración en el eje transversal del vehículo: Este sensor mide la aceleración y el frenado, así como el paso alrededor del eje transversal del vehículo (subida y bajada del morro y la cola).
Si la unidad de control del módulo de seguridad contra choques ACSM no recibe ninguna señal de los sensores de aceleración, se utilizan las señales del sensor central para los cálculos y controles del 5DX BMW Personal Pilot L3.
El sensor central está conectado a la unidad de control de la plataforma de conducción automática media (MPAD) y de ella recibe la tensión eléctrica y la tierra.
*Foto del sensor central (1) y la conexión de 4 pins (2).
HAD Módulo de freno
En el coche se instala un sistema de freno secundario o de respaldo, el llamado Módulo de freno HAD, para detener el vehículo de forma segura en todas las situaciones de conducción.
En caso de emergencia, si el Control Dinámico de Estabilidad (DSC) del sistema de frenado primario no puede aumentar la fuerza de frenado, entonces el módulo de freno HAD se hace cargo del frenar el vehículo.
En esta situación, la bomba hidráulica del módulo de freno HAD extrae el líquido de frenos del tanque de expansión y frena el vehículo usando solo los frenos del eje delantero.
Los dos sensores de velocidad de las ruedas delanteras están conectados eléctricamente al módulo de freno HAD, quien reenvía la señal en cables separados redundados al Control Dinámico de Estabilidad (DSC).
*Foto del Módulo de freno HAD (1) y del conector de 46 pins (2).
EPS Sistema de dirección electromecánica asistida de dos canales
Para la conducción altamente automatizada 5DX se necesita también que la dirección este redundada y por ello se instala un Sistema de dirección electromecánica asistida de dos canales EPS, para que el coche pueda girar y esquivar obstáculos en cualquier situación.
Por ello, la unidad de control del EPS está conectada al sistema eléctrico por 4 conectores.
Además, para mayor seguridad, hay un sensor de par de dirección conectado a la unidad de control EPS que tiene otras 2 conexiones.
*Foto del sistema de dirección electromecánica asistida de dos canales EPS (1), del sensor de par de dirección (2), y de los conectores de 2 pins (3, 5, 6) y 3 pins (4).
En el siguiente link se puede consultar la 1a Parte de esta guía de sensores, radares y cámaras:
Noticia - Guía de sensores, radares y cámaras BMW (Parte 1)
Guía de sensores, radares y cámaras BMW (Parte 1): En este post se detallan todas los radares, cámaras y sensores que tienen o pueden tener como opción nuestros coches BMW actuales. También explicaremos lo que es el LiDAR. Se indica el nombre y el código de cada opción. El código sirve para...
Y en el siguiente link se puede consultar la 2a Parte de esta guía de sensores, radares y cámaras:
Noticia - Guía de sensores, radares y cámaras BMW (Parte 2)
Guía de sensores, radares y cámaras BMW (Parte 2). En este post explicaremos todos los sensores, radares y cámaras que pueden llevar nuestros coches BMW actuales. Sensores y radares en la calandra delantera En la parte delantera o morro del coche entre los faros delanteros, hay la calandra...
Saludos.
Edito PDF: https://www.bmwfaq.org/attachments/...187169/?hash=5e5d4cfdc63f9b07304aff9994ee6e3c
Archivos adjuntos
Última edición: